Performances of the New HEC-RAS Version 5 for 2-D Hydrodynamic-Based Rainfall-Runoff Simulations at Basin Scale: Comparison with a State-of-the Art Model

 , ,
, ,
Abstract
:1. Introduction
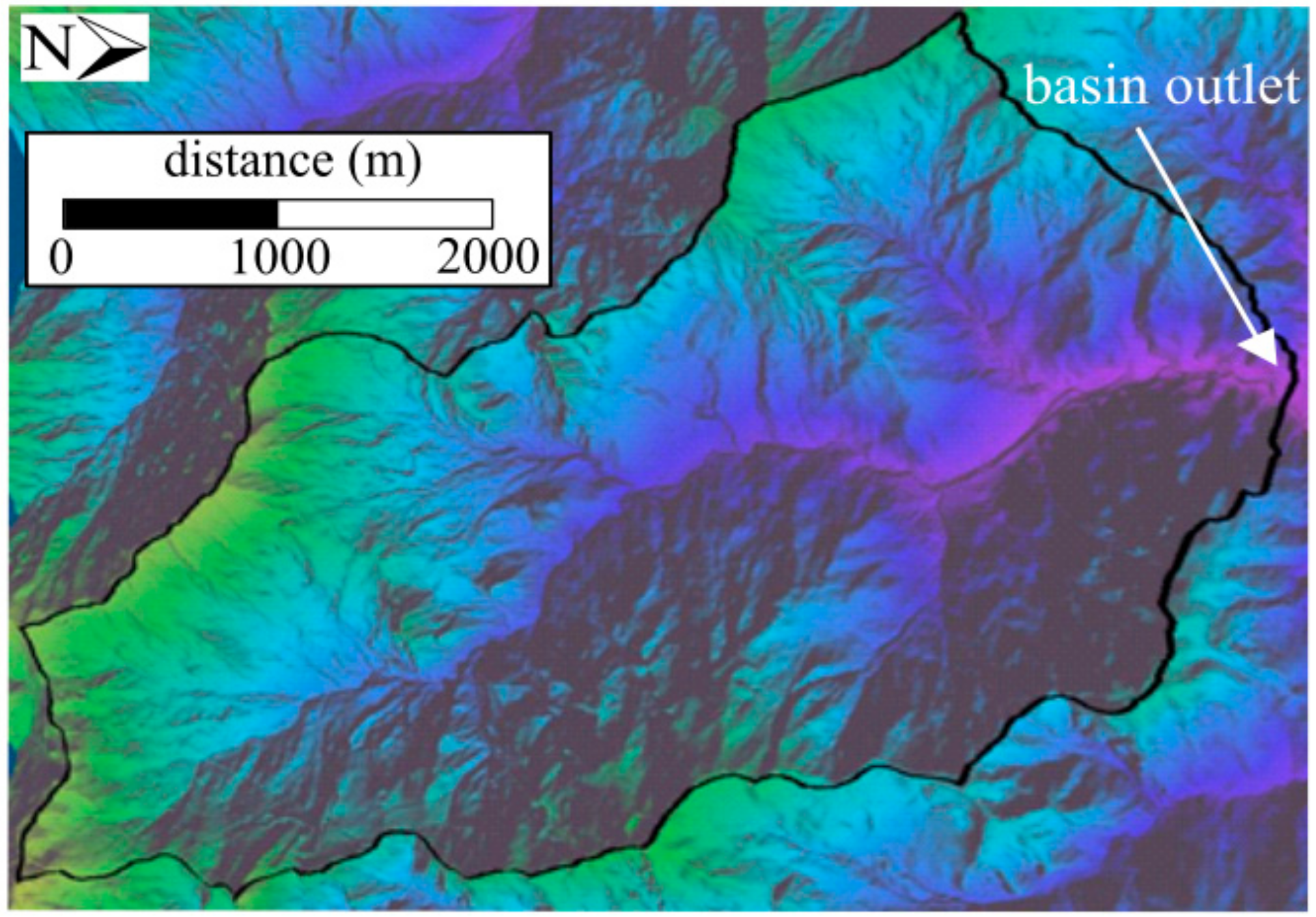
2. Case Study: Scuropasso Basin
3. Methods
3.1. Hydrodynamic Models for Surface Runoff
3.1.1. HEC-RAS 5.0.7
3.1.2. Shallow Water Equations-Finite Volume Code
3.2. Computational Grids and Boundary Conditions
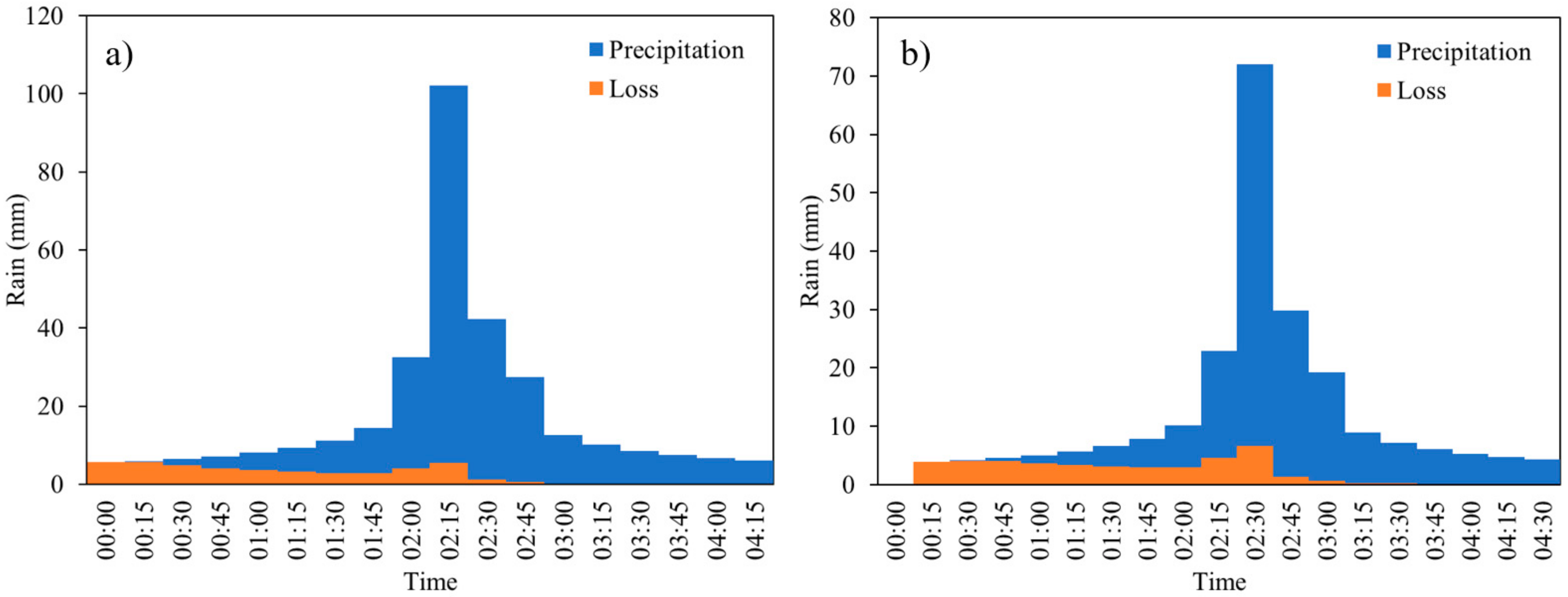
3.3. Net Rainfall Computation and Roughness Estimation
3.4. Flood Hazard Estimation
3.5. Performance Measures
4. Results and Discussion
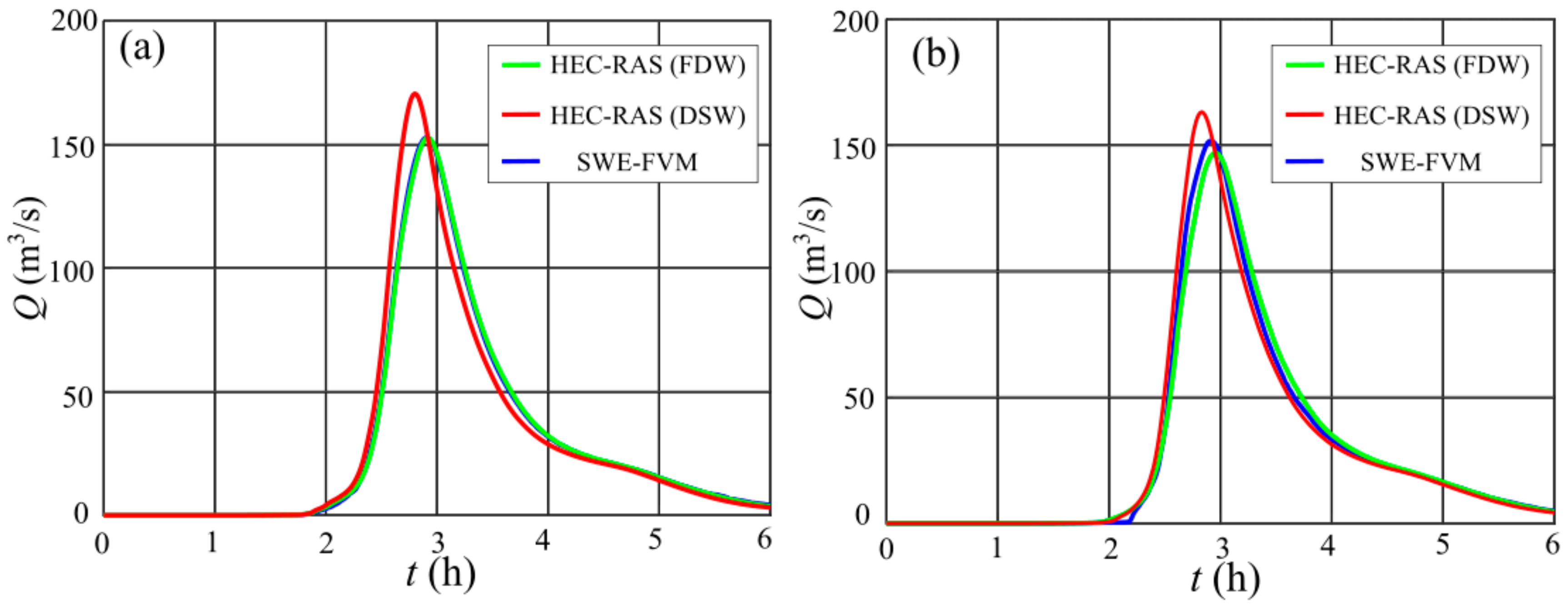
4.1. Discharge Hydrographs at the Basin Outlet
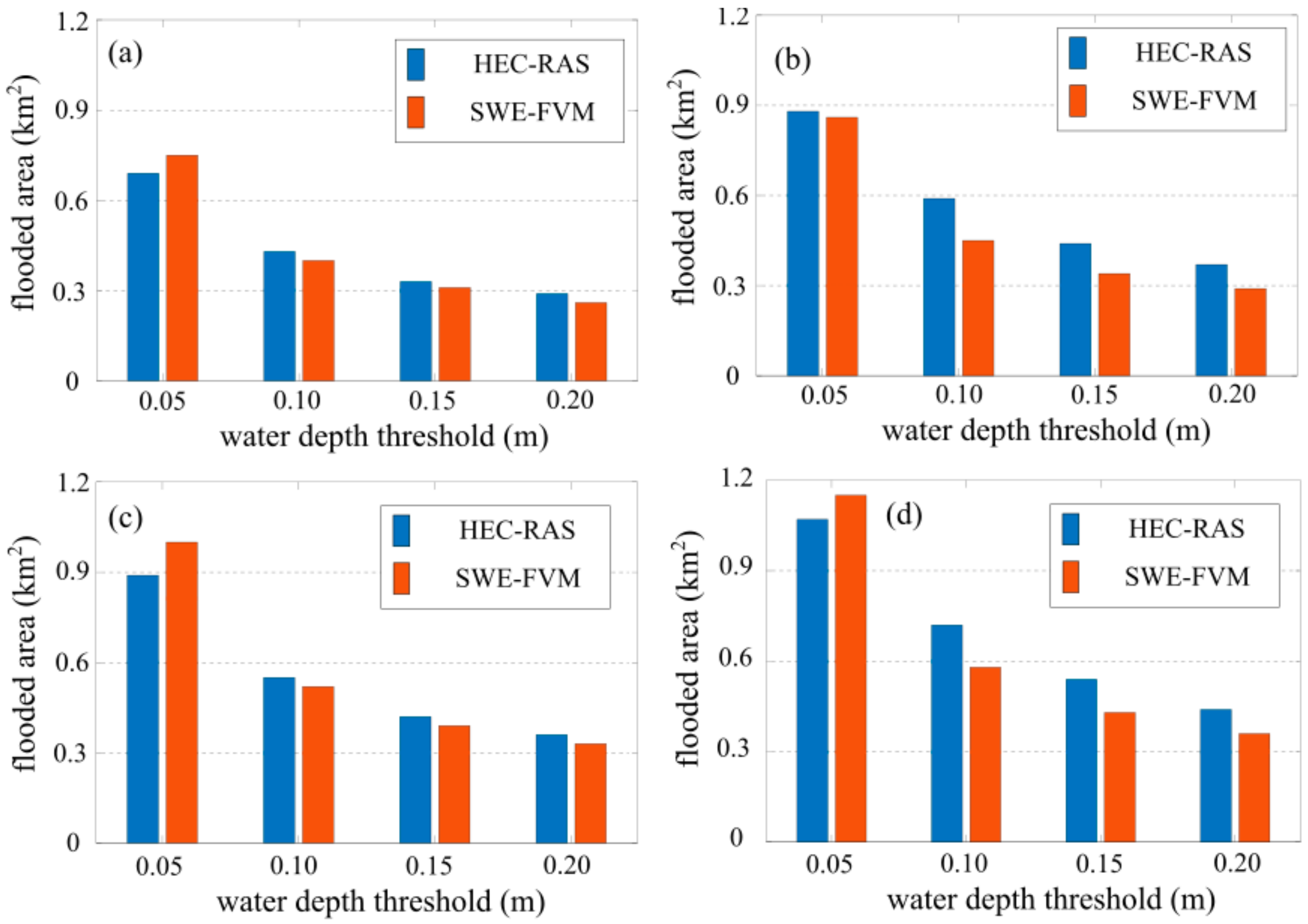
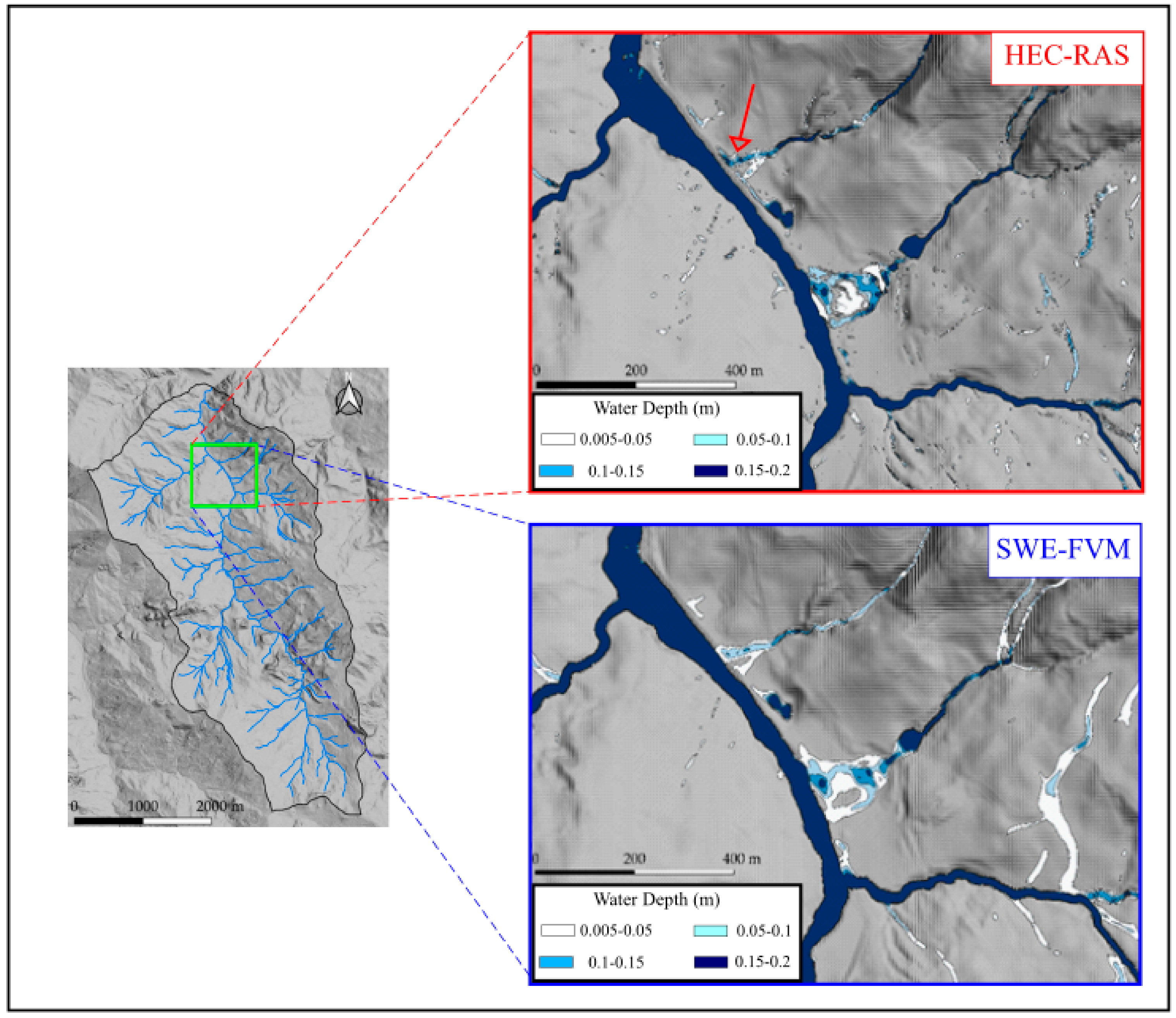
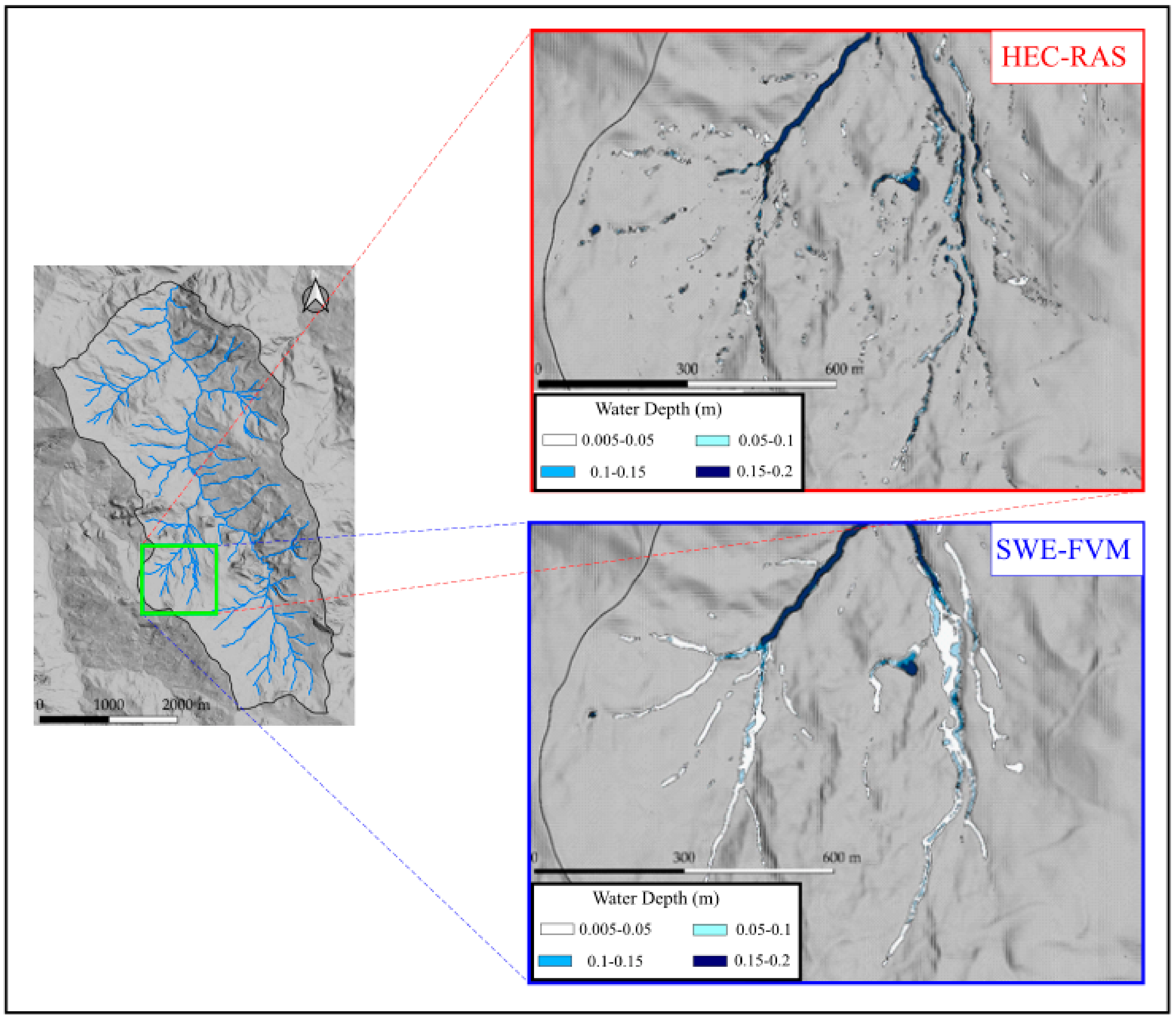
4.2. Simulated Flooded Area Extent
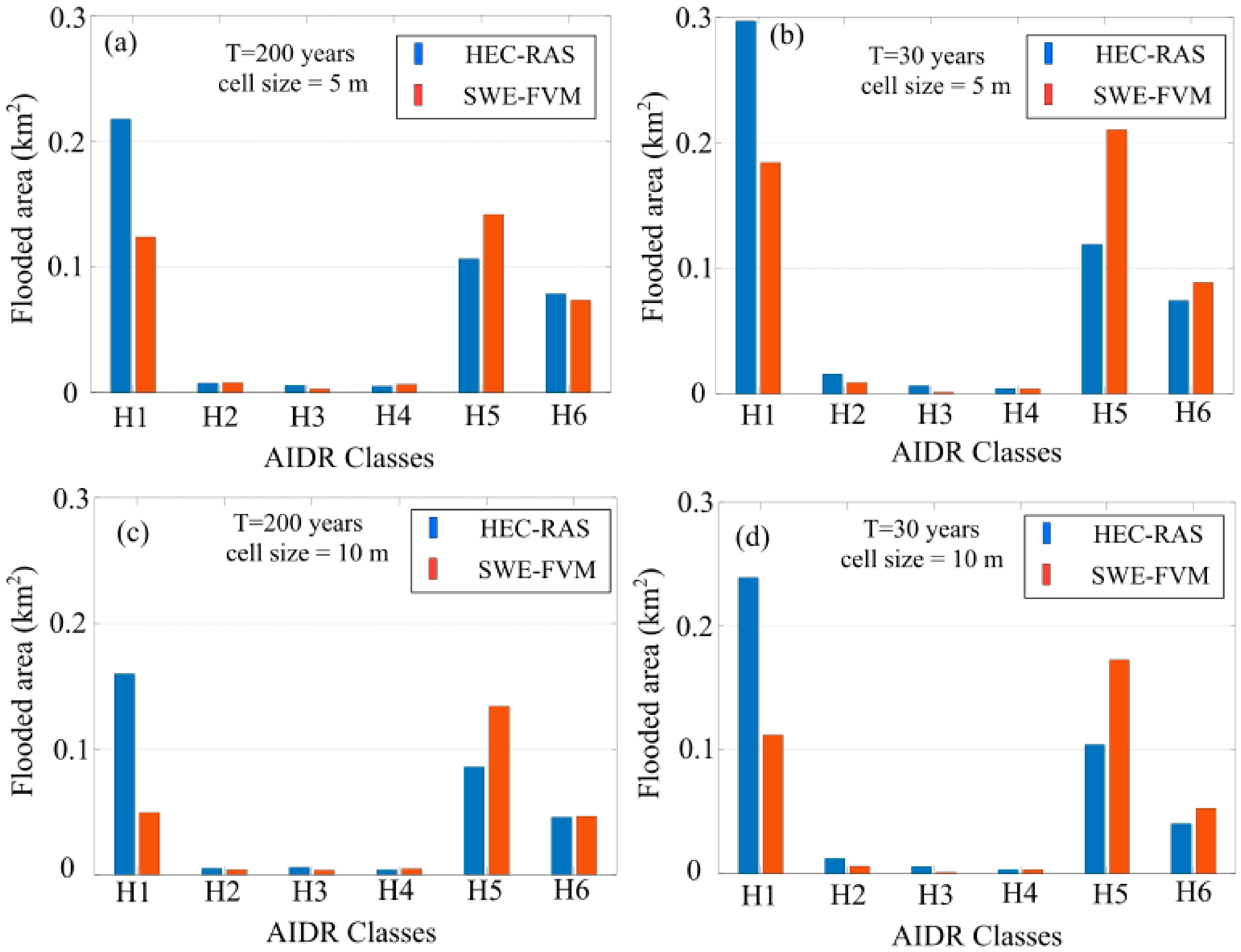
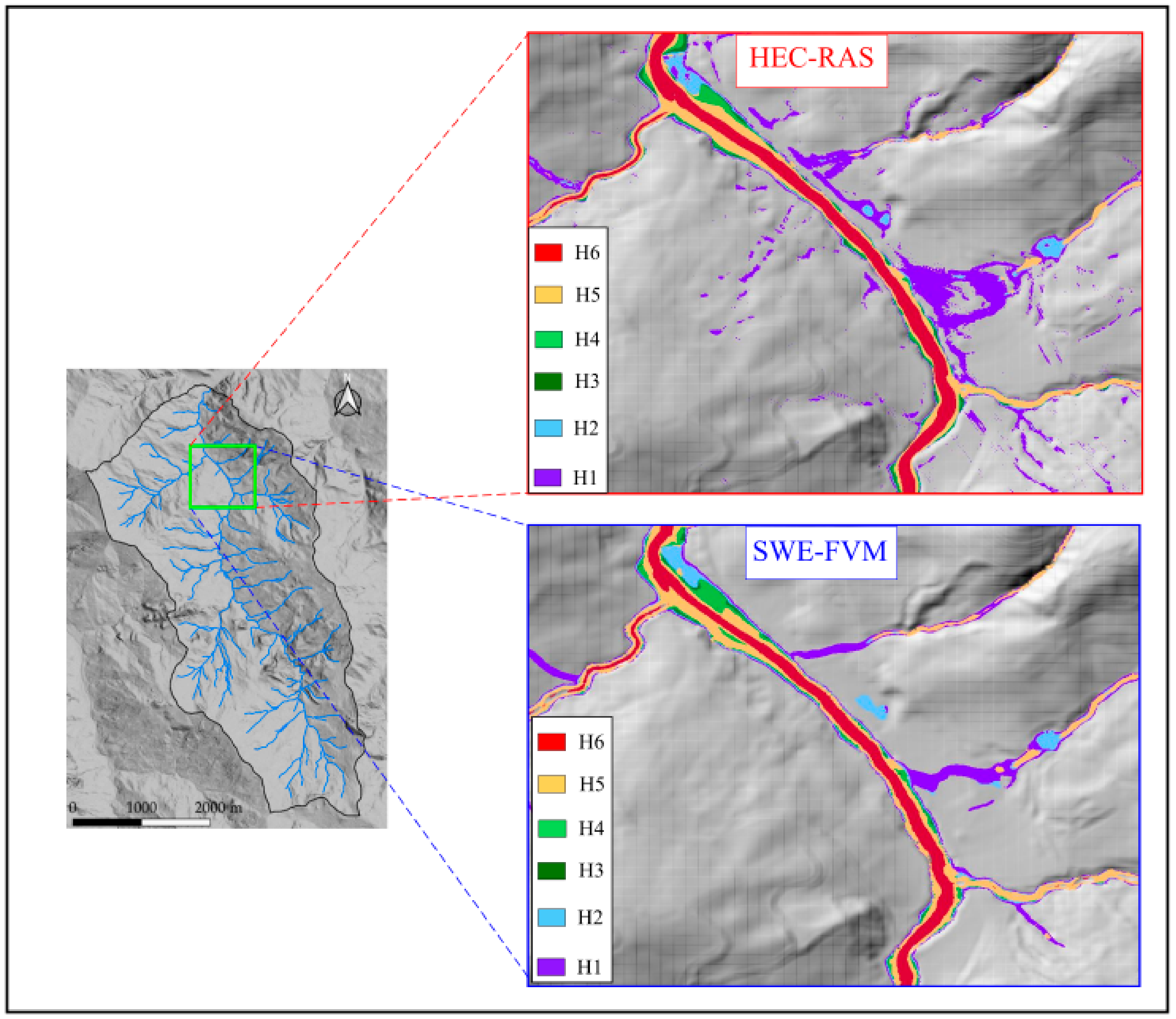
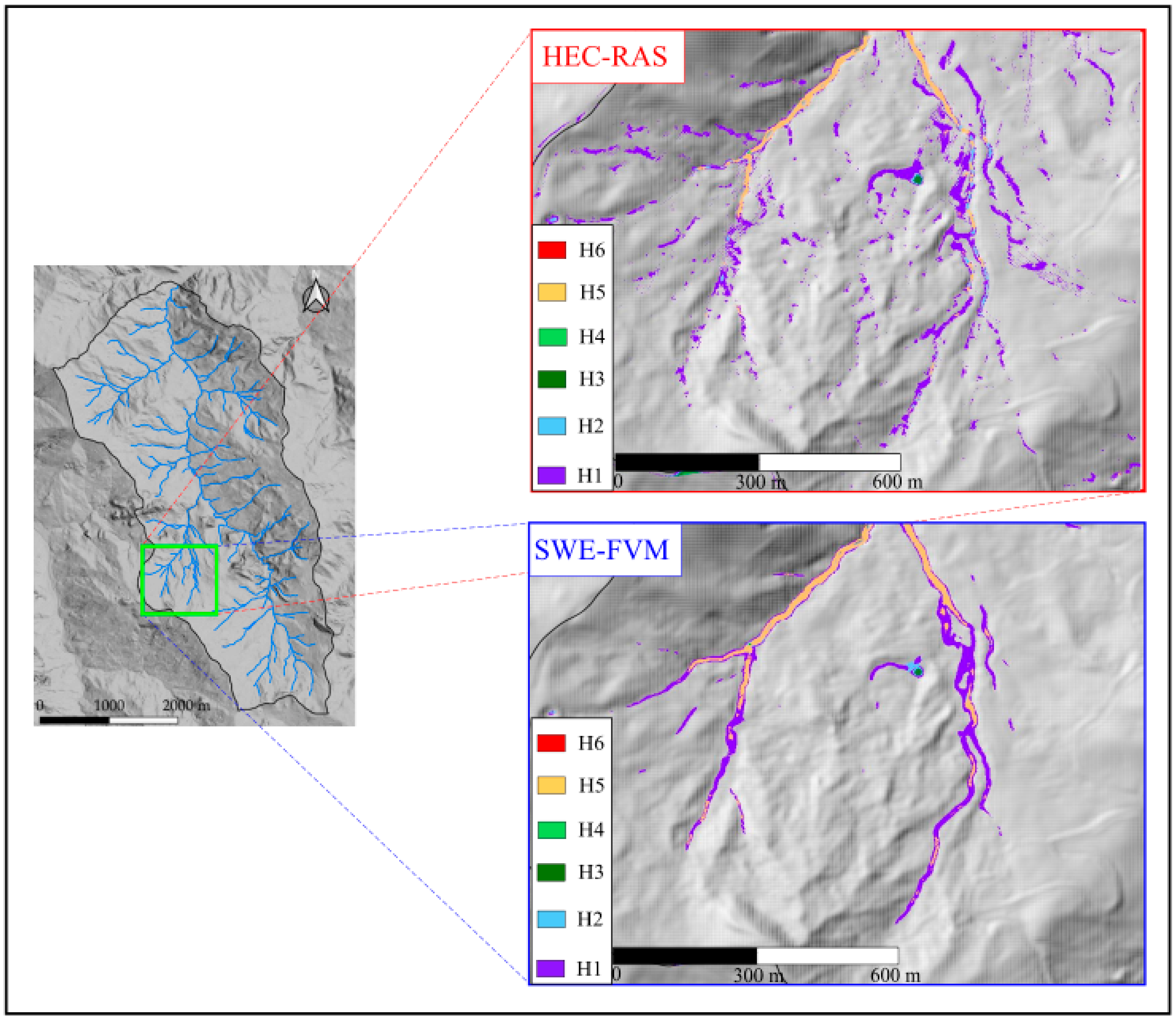
4.3. Flood Hazard Classification
5. Conclusions
- Using the “full momentum” options, HEC-RAS has provided very similar results in terms of the flood wave shape, peak discharge and time to peak in respect of SWE-FVM. The diffusive wave version (DSW) of HEC-RAS overestimates the peak discharges values computed by the other two models, showing a tendency to simulate faster flood waves;
- The reduction of the computational times obtained using the DSW option is not significant for finer grid but it becomes important using a coarser one, with time savings up to 40%;
- The analysis of flood extent, carried out for different pre-fixed water depth thresholds, highlights that, except for the smaller threshold, HEC-RAS has always overestimated the SWE-FVM flooded areas with variations approximately equal to 5–10% and 20–30% for the fine grid and coarse grid respectively. The variations in terms of flooded areas increase as the cell size increases and the return period decreases, at least for the coarse grid;
- The flooded area related to the first threshold (0.05 m) is underestimated in respect to the SWE-FVM one. In particular, the part of the network having lower Horton-Strahler order is described by HEC-RAS as disconnected, while HEC-RAS and the SWE-FVM models describe the main channel in a similar way;
- The application of the AIDR criterion for hazard class mapping has highlighted significant variations between the two models. For example, in respect to the SWE-FDW results, HEC-RAS has significantly underestimated the flooded areas related to the H5 class while an important overestimation has been observed for the H1 class;
- The application of the performance measures has highlighted that the areas flooded by the two models belonging to a specific hazard class are far to be coincident, at least for the first five classes.
Author Contributions
Funding
Conflicts of Interest
References
- EXCIMAP. Handbook on Good Practices for Flood Mapping in Europe. European Exchange of Circle on Flood Mapping. Available online: https://ec.europa.eu/environment/water/flood_risk/flood_atlas/pdf/handbook_goodpractice.pdf (accessed on 17 August 2020).
- Petaccia, G.; Natale, E. Orsadem: A one-dimensional shallow water code for flood inundation modelling. Irrig. Drain. 2013, 62, 29–40. [Google Scholar] [CrossRef]
- Costabile, P.; Macchione, F. Analysis of One-Dimensional Modelling for Flood Routing in Compound Channels. Water Resour. Manag. 2012, 26, 1065–1087. [Google Scholar]
- Horritt, M.S.; Bates, P.D. Evaluation of 1D and 2D numerical models for predicting river flood inundation. J. Hydrol. 2002, 268, 87–99. [Google Scholar]
- Tayefi, V.; Lane, S.N.; Hardy, R.J.; Yu, D. A comparison of one- and two-dimensional approaches to modelling flood inundation over complex upland floodplains. Hydrol. Process. 2007, 21, 3190–3202. [Google Scholar]
- Falter, D.; Vorogushyn, S.; Lhomme, J.; Apel, H.; Gouldby, B.; Merz, B. Hydraulic model evaluation for large-scale flood risk assessments. Hydrol. Process. 2013, 27, 1331–1340. [Google Scholar]
- Costabile, P.; Macchione, F.; Natale, L.; Petaccia, G. Flood mapping using LIDAR DEM. Limitations of the 1-D modeling highlighted by the 2-D approach. Nat. Hazards 2015, 77, 181–204. [Google Scholar]
- Costabile, P.; Macchione, F.; Natale, L.; Petaccia, G. Comparison of scenarios with and without bridges and analysis of backwater effect in 1-D and 2-D river flood modeling. CMES Comp. Model. Eng. Sci. 2015, 109, 81–103. [Google Scholar]
- Martínez-Gomariz, E.; Gómez, M.; Russo, B.; Djordjević, S. Stability criteria for flooded vehicles: A state-of-the-art review. J. Flood Risk Manag. 2018, 11, S817–S826. [Google Scholar]
- Bermúdez, M.; Zischg, A.P. Sensitivity of flood loss estimates to building representation and flow depth attribution methods in micro-scale flood modelling. Nat. Hazards 2018, 92, 1633–1648. [Google Scholar]
- Arrighi, C.; Pregnolato, M.; Dawson, R.J.; Castelli, F. Preparedness against mobility disruption by floods. Sci. Total Environ. 2019, 654, 1010–1022. [Google Scholar] [CrossRef]
- Macchione, F.; Costabile, P.; Costanzo, C.; Gangi, F. Modello idraulico per l’analisi a scala di bacino della pericolosità delle piene impulsive. In Fully-Hydrodynamics Watershed Model for Flash-Flood Hazard Analysis, Proceedings of the Italian Conference on Integrated River Basin Management (ICIRBM—Guardia 2019), Guardia Piemontese, CS, Italy, 19–22 June 2019; EdiBios: Cosenza, Italy, 2019; Volume 40, pp. 105–117. ISSN 2282–5517. [Google Scholar]
- Costabile, P.; Costanzo, C.; De Lorenzo, G.; Macchione, F. Is local flood hazard assessment in urban areas significantly influenced by the physical complexity of the hydrodynamic inundation model? J. Hydrol. 2020, 580, 124231. [Google Scholar] [CrossRef]
- Petaccia, G.; Natale, L. 1935 Sella Zerbino dam break case revisited: A new hydrologic and hydraulic analysis. J. Hydraul. Eng. 2020, 146. [Google Scholar] [CrossRef]
- Mignot, E.; Paquier, A.; Haider, S. Modeling floods in a dense urban area using 2D shallow water equations. J. Hydrol. 2006, 327, 186–199. [Google Scholar] [CrossRef] [Green Version]
- Brath, A.; Carisi, F.; Domeneghetti, A.; Castellarin, A. Modelli di danno da alluvione uni- e multi-variati: Esperienze acquisite dall’evento alluvionale del fume Secchia. In Uni- and Multi-Variable Modelling of Flood Losses: Experiences Gained from the Secchia River Inundation Event, Proceedings of the Italian Conference on Integrated River Basin Management (ICIRBM—Guardia 2019), Guardia Piemontese, CS, Italy, 19–22 June 2019; EdiBios: Cosenza, Italy, 2019; Volume 40, pp. 15–27. ISSN 2282-5517. [Google Scholar]
- Ernst, J.; Dewals, B.J.; Detrembleur, S.; Archambeau, P.; Erpicum, S.; Pirotton, M. Micro-scale flood risk analysis based on detailed 2D hydraulic modelling and high resolution geographic data. Nat. Hazards 2010, 55, 181–209. [Google Scholar]
- Costabile, P.; Macchione, F. Enhancing river model set-up for 2-D dynamic flood modelling. Environ. Model. Softw. 2015, 67, 89–107. [Google Scholar] [CrossRef]
- Dazzi, S.; Vacondio, R.; Mignosa, P. Integration of a Levee Breach Erosion Model in a GPU-Accelerated 2D Shallow Water Equations Code. Water Resour. Res. 2019, 55, 682–702. [Google Scholar] [CrossRef]
- Lacasta, A.; Morales-Hernández, M.; Murillo, J.; García-Navarro, P. GPU implementation of the 2D shallow water equations for the simulation of rainfall/runoff events. Environ. Earth Sci. 2015, 74, 7295–7305. [Google Scholar] [CrossRef]
- Vacondio, R.; Dal Palù, A.; Ferrari, A.; Mignosa, P.; Aureli, F.; Dazzi, S. A non-uniform efficient grid type for GPU-parallel Shallow Water Equations models. Environ. Model. Softw. 2017, 88, 119–137. [Google Scholar]
- Hu, P.; Lei, Y.; Han, J.; Cao, Z.; Liu, H.; He, Z. Computationally efficient modeling of hydro-sediment-morphodynamic processes using a hybrid local time step/global maximum time step. Adv. Water Resour. 2019, 127, 26–38. [Google Scholar] [CrossRef]
- Simões, N.E.; Ochoa-Rodríguez, S.; Wang, L.-P.; Pina, R.D.; Marques, A.S.; Onof, C.; Leitão, J.P. Stochastic urban pluvial flood hazard maps based upon a spatial-temporal rainfall generator. Water 2015, 7, 3396–3406. [Google Scholar] [CrossRef]
- Liu, Z.; Merwade, V.; Jafarzadegan, K. Investigating the role of model structure and surface roughness in generating flood inundation extents using one- and two-dimensional hydraulic models. J. Flood Risk Manag. 2019, 12, e12347. [Google Scholar] [CrossRef] [Green Version]
- Sole, A.; Albano, R.; Samela, C.; Craciun, I.; Perrone, A.; Manfreda, S.; Ozunu, A. Mappatura del danno alluvionale a vasta scala: Un’applicazione in Romania. In Large Scale Flood Risk Mapping: An Application over Romania, Proceedings of the Italian Conference on Integrated River Basin Management (ICIRBM—Guardia 2019), Guardia Piemontese, CS, Italy, 19–22 June 2019; EdiBios: Cosenza, Italy, 2019; Volume 40, pp. 77–90. ISSN 2282-5517. [Google Scholar]
- Bomers, A.; Schielen, R.M.J.; Hulscher, S.J.M.H. Application of a lower-fidelity surrogate hydraulic model for historic flood reconstruction. Environ. Model. Softw. 2019, 117, 223–236. [Google Scholar] [CrossRef] [Green Version]
- Quirogaa, V.M.; Kurea, S.; Udoa, K.; Manoa, A. Application of 2D numerical simulation for the analysis of the February 2014 Bolivian Amazonia flood: Application of the new HEC-RAS version 5. RIBAGUA 2016, 3, 25–33. [Google Scholar] [CrossRef] [Green Version]
- Lea, D.; Yeonsu, K.; Hyunuk, A. Case study of HEC-RAS 1D-2D coupling simulation: 2002 Baeksan flood event in Korea. Water 2019, 11, 2048. [Google Scholar] [CrossRef] [Green Version]
- Patel, D.P.; Ramirez, J.A.; Srivastava, P.K.; Bray, M.; Han, D. Assessment of flood inundation mapping of Surat city by coupled 1D/2D hydrodynamic modeling: A case application of the new HEC-RAS 5. Nat. Hazards 2017, 89, 93–130. [Google Scholar] [CrossRef]
- Pasquier, U.; He, Y.; Hooton, S.; Goulden, M.; Hiscock, K.M. An integrated 1D–2D hydraulic modelling approach to assess the sensitivity of a coastal region to compound flooding hazard under climate change. Nat. Hazards 2019, 98, 915–937. [Google Scholar]
- Pinos, J.; Timbe, L. Performance assessment of two-dimensional hydraulic models for generation of flood inundation maps in mountain river basins. Water Sci. Eng. 2019, 12, 11–18. [Google Scholar] [CrossRef]
- Vozinaki, A.-E.K.; Morianou, G.G.; Alexakis, D.D.; Tsanis, I.K. Comparing 1D and combined 1D/2D hydraulic simulations using high-resolution topographic data: A case study of the Koiliaris basin, Greece. Hydrol. Sci. J. 2017, 62, 642–656. [Google Scholar]
- Shustikova, I.; Domeneghetti, A.; Neal, J.C.; Bates, P.; Castellarin, A. Comparing 2D capabilities of HEC-RAS and LISFLOOD-FP on complex topography. Hydrol. Sci. J. 2019, 64, 1769–1782. [Google Scholar] [CrossRef]
- Pilotti, M.; Milanesi, L.; Bacchi, V.; Tomirotti, M.; Maranzoni, A. Dam-Break Wave Propagation in Alpine Valley with HEC-RAS 2D: Experimental Cancano Test Case. J. Hydraul. Eng. 2020, 146, 05020003. [Google Scholar]
- Afshari, S.; Tavakoly, A.A.; Rajib, M.A.; Zheng, X.; Follum, M.L.; Omranian, E.; Fekete, B.M. Comparison of new generation low-complexity flood inundation mapping tools with a hydrodynamic model. J. Hydrol. 2018, 556, 539–556. [Google Scholar]
- Jamali, B.; Bach, P.M.; Cunningham, L.; Deletic, A. A Cellular Automata Fast Flood Evaluation (CA-ffé) Model. Water Resour. Res. 2019, 55, 4936–4953. [Google Scholar] [CrossRef] [Green Version]
- Yalcin, E. Assessing the impact of topography and land cover data resolutions on two-dimensional HEC-RAS hydrodynamic model simulations for urban flood hazard analysis. Nat. Hazards 2020, 101, 995–1017. [Google Scholar] [CrossRef]
- Mihu-Pintilie, A.; Cîmpianu, C.I.; Stoleriu, C.C.; Pérez, M.N.; Paveluc, L.E. Using high-density LiDAR data and 2D streamflow hydraulic modeling to improve urban flood hazard maps: A HEC-RAS multi-scenario approach. Water 2019, 11, 1832. [Google Scholar] [CrossRef] [Green Version]
- Stoleriu, C.C.; Urzica, A.; Mihu-Pintilie, A. Improving flood risk map accuracy using high-density LiDAR data and the HEC-RAS river analysis system: A case study from north-eastern Romania. J. Flood Risk Manag. 2019, 13, e12572. [Google Scholar] [CrossRef]
- Yu, F.; Harbor, J.M. The effects of topographic depressions on multiscale overland flow connectivity: A high-resolution spatiotemporal pattern analysis approach based on connectivity statistics. Hydrol. Process. 2019, 33, 1403–1419. [Google Scholar] [CrossRef]
- Hall, J. Direct rainfall flood modelling: The good, the bad and the ugly. Australas. J. Water Resour. 2015, 19, 74–85. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; De Bartolo, S.; Gangi, F.; Macchione, F.; Tomasicchio, G.R. Hydraulic Characterization of River Networks Based on Flow Patterns Simulated by 2-D Shallow Water Modeling: Scaling Properties, Multifractal Interpretation, and Perspectives for Channel Heads Detection. Water Resour. Res. 2019, 55, 7717–7752. [Google Scholar]
- Cea, L.; Garrido, M.; Puertas, J. Experimental validation of two-dimensional depth-averaged models for forecasting rainfall-runoff from precipitation data in urban areas. J. Hydrol. 2010, 382, 88–102. [Google Scholar] [CrossRef]
- Fernández-Pato, J.; Caviedes-Voullième, D.; García-Navarro, P. Rainfall/runoff simulation with 2D full shallow water equations: Sensitivity analysis and calibration of infiltration parameters. J. Hydrol. 2016, 536, 496–513. [Google Scholar]
- Bout, B.; Jetten, V.G. The validity of flow approximations when simulating catchment-integrated flash floods. J. Hydrol. 2018, 556, 674–688. [Google Scholar]
- Xia, X.; Liang, Q.; Ming, X. A full-scale fluvial flood modelling framework based on a high-performance integrated hydrodynamic modelling system (HiPIMS). Adv. Water Resour. 2019, 132, 103392. [Google Scholar]
- Caviedes-Voullième, D.; Fernández-Pato, J.; Hinz, C. Performance assessment of 2D Zero-Inertia and Shallow Water models for simulating rainfall-runoff processes. J. Hydrol. 2020, 584, 124663. [Google Scholar]
- Bellos, V.; Papageorgaki, I.; Kourtis, I.; Vangelis, H.; Kalogiros, I.; Tsakiris, G. Reconstruction of a flash flood event using a 2D hydrodynamic model under spatial and temporal variability of storm. Nat. Hazards 2020, 101, 711–726. [Google Scholar] [CrossRef]
- Aureli, F.; Prost, F.; Vacondio, R.; Dazzi, S.; Ferrari, A. A GPU-accelerated shallow-water scheme for surface runoff simulations. Water 2020, 12, 637. [Google Scholar]
- Brunner, G.W. HEC-RAS River Analysis System. HYDRAULIC Reference Manual. Version 5.0; Hydrologic Engineering Center: Davis, CA, USA, 2016.
- Roe, P.L. Approximate Riemann solvers, parameter vectors, and difference schemes. J. Comput. Phys. 1981, 43, 357–372. [Google Scholar]
- Costabile, P.; Costanzo, C.; Macchione, F. A storm event watershed model for surface runoff based on 2D fully dynamic wave equations. Hydrol. Process. 2013, 27, 554–569. [Google Scholar]
- Cea, L.; Bladé, E. A simple and efficient unstructured finite volume scheme for solving the shallow water equations in overland flow applications. Water Resour. Res. 2015, 51, 5464–5486. [Google Scholar]
- Costabile, P.; Costanzo, C.; Macchione, F. Two-dimensional numerical models for overland flow simulations. WIT Trans. Ecol. Environ. 2012, 124, 137–148. [Google Scholar]
- Macchione, F.; Costabile, P.; Costanzo, C.; De Lorenzo, G. Extracting quantitative data from non-conventional information for the hydraulic reconstruction of past urban flood events. A case study. J. Hydrol. 2019, 576, 443–465. [Google Scholar]
- Kim, B.; Sanders, B.F.; Schubert, J.E.; Famiglietti, J.S. Mesh type tradeoffs in 2D hydrodynamic modeling of flooding with a Godunov-based flow solver. Adv. Water Resour 2014, 68, 42–61. [Google Scholar] [CrossRef] [Green Version]
- Ferraro, D.; Costabile, P.; Costanzo, C.; Petaccia, G.; Macchione, F. A spectral analysis approach for the a priori generation of computational grids in the 2-D hydrodynamic-based runoff simulations at a basin scale. J. Hydrol. 2020, 582, 124508. [Google Scholar] [CrossRef]
- Zhang, W.; Montgomery, D.R. Digital elevation model grid size, landscape representation, and hydrologic simulations. Water Resour. Res. 1994, 30, 1019–1028. [Google Scholar] [CrossRef]
- Casulli, V.; Stelling, G.S. Semi-implicit subgrid modelling of three-dimensional free-surface flows. Int. J. Numer. Methods Fluids 2011, 67, 441–449. [Google Scholar] [CrossRef]
- United States Soil Conservation Service (S.C.S.). National Engineering Handbook, Section 4—Hydrology; Dept. of Agriculture, Soil Conservation Service: Washington, DC, USA, 1985.
- Smith, G.P.; Davey, E.K.; Cox, R.J. Flood Hazard. Technical Report 2014/07; Water Research Laboratory, University of New South Wales: Sydney, Australia, 2014. [Google Scholar]
- AIDR. Flood Hazard. Australian Disaster Resilience Handbook Collection. Guide 7–3. 2017. Available online: https://knowledge.aidr.org.au/media/3518/adr-guideline-7-3.pdf (accessed on 17 August 2020).
- Bocanegra, R.A.; Vallés-Morán, F.J.; Francés, F. Review and analysis of vehicles stability models during floods and proposal for future improvements. J. Flood Risk Manag. 2019, 13, e12551. [Google Scholar] [CrossRef] [Green Version]
- Gangi, F. Applicazione delle Shallow Water Equations per la Simulazione Numerica a Scala di Bacino Degli Eventi Alluvionali. Ph.D. Thesis, University of Calabria, Rende, Italy, 2020. [Google Scholar]
- Macchione, F.; Gangi, F.; Costanzo, C.; Costabile, P.; Lombardo, M. Influenza della risoluzione spaziale dei domini di calcolo sull’analisi della pericolosità idraulica a scala di bacino. In Grid Resolution Effects on the Flood Hazard Assessment at the Basin Scale, Proceedings of the Italian Conference on Integrated River Basin Management (ICIRBM—Guardia 2020), Guardia Piemontese, CS, Italy, 17–20 June 2020; EdiBios: Cosenza, Italy, 2020; Volume 41, pp. 41–54. ISSN 2282–5517. [Google Scholar]
- Sampson, C.C.; Smith, A.M.; Bates, P.B.; Neal, J.C.; Alfieri, L.; Freer, J.E. A high-resolution global flood hazard model. Water Resour. Res. 2015, 51, 7358–7381. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hazard Class | Description | Classification Limits (m2/s) | Limiting Still Water Depth h (m) | Limiting Velocity V (m/s) |
|---|---|---|---|---|
| H1 | Generally safe for vehicles, people and buildings. | hV < 0.3 1 | H < 0.3 | V < 2 |
| H2 | Unsafe for small vehicles. | hV ≤ 0.6 | H < 0.5 | V < 2 |
| H3 | Unsafe for vehicles, children and the elderly. | hV ≤ 0.6 | H < 1.2 | V < 2 |
| H4 | Unsafe for vehicles and people. | hV < 1.0 | H < 2.0 | V < 2 |
| H5 | Unsafe for vehicles and people. All building types vulnerable to structural damage. Some less robust building types vulnerable to failure | hV ≤ 4.0 | H < 4.0 | V < 4 |
| H6 | Unsafe for vehicles and people. All building types considered vulnerable to failure | hV > 4.0 |
| Model | Return Period (years) | Grid Element Side (m) | Time to Peak (h) | Peak Discharge (m3/s) | Ratio between Computational Times and Real Time |
|---|---|---|---|---|---|
| HEC-RAS (DSW) | 30 | 5 | 2.80 | 170.6 | 4.03 |
| HEC-RAS (FDW) | 30 | 5 | 2.92 | 152.8 | 4.32 |
| SWE-FVM | 30 | 5 | 2.90 | 152.8 | 0.20 |
| HEC-RAS (DSW) | 30 | 10 | 2.83 | 163.2 | 0.47 |
| HEC-RAS (FDW) | 30 | 10 | 2.95 | 147.0 | 0.76 |
| SWE-FVM | 30 | 10 | 2.92 | 151.8 | 0.05 |
| HEC-RAS (DSW) | 200 | 5 | 2.73 | 270.7 | 4.42 |
| HEC-RAS (FDW) | 200 | 5 | 2.83 | 242.3 | 4.63 |
| SWE-FVM | 200 | 5 | 2.8 | 241.9 | 0.20 |
| HEC-RAS (DSW) | 200 | 10 | 2.75 | 261.5 | 0.50 |
| HEC-RAS (FDW) | 200 | 10 | 2.87 | 232.9 | 0.82 |
| SWE-FVM | 200 | 10 | 2.82 | 242.0 | 0.06 |
| Return Period (years) | Grid Resolution (m) | Model | Flooded Area for 0.05 m (km2) | Flooded Area for 0.10 m (km2) | Flooded Area for 0.15 m (km2) | Flooded Area for 0.20 m (km2) |
|---|---|---|---|---|---|---|
| 30 | 5 | HEC-RAS | 0.69 | 0.43 | 0.33 | 0.29 |
| 30 | 5 | SWE-FVM | 0.75 | 0.40 | 0.31 | 0.26 |
| 30 | 10 | HEC-RAS | 0.88 | 0.59 | 0.44 | 0.37 |
| 30 | 10 | SWE-FVM | 0.86 | 0.45 | 0.34 | 0.29 |
| 200 | 5 | HEC-RAS | 0.89 | 0.55 | 0.42 | 0.36 |
| 200 | 5 | SWE-FVM | 1.0 | 0.52 | 0.39 | 0.33 |
| 200 | 10 | HEC-RAS | 1.07 | 0.72 | 0.54 | 0.44 |
| 200 | 10 | SWE-FVM | 1.15 | 0.58 | 0.43 | 0.36 |
| Hazard Class | H1 | H2 | H3 | H4 | H5 | H6 |
|---|---|---|---|---|---|---|
| CSI | 0.13 | 0.22 | 0.27 | 0.23 | 0.26 | 0.81 |
| HR | 0.47 | 0.38 | 0.52 | 0.31 | 0.27 | 0.89 |
| FAR | 0.84 | 0.67 | 0.64 | 0.57 | 0.42 | 0.10 |
| B | 5.11 | 1.4 | 1.96 | 0.61 | 0.34 | 0.83 |
| Hazard Class | H1 | H2 | H3 | H4 | H5 | H6 |
|---|---|---|---|---|---|---|
| CSI | 0.13 | 0.30 | 0.18 | 0.20 | 0.05 | 0.81 |
| HR | 0.27 | 0.44 | 0.36 | 0.27 | 0.01 | 0.92 |
| FAR | 0.81 | 0.53 | 0.75 | 0.61 | 0.97 | 0.13 |
| B | 2.09 | 0.94 | 2.70 | 0.60 | 0.43 | 1.88 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Costabile, P.; Costanzo, C.; Ferraro, D.; Macchione, F.; Petaccia, G. Performances of the New HEC-RAS Version 5 for 2-D Hydrodynamic-Based Rainfall-Runoff Simulations at Basin Scale: Comparison with a State-of-the Art Model. Water 2020, 12, 2326. https://doi.org/10.3390/w12092326
Costabile P, Costanzo C, Ferraro D, Macchione F, Petaccia G. Performances of the New HEC-RAS Version 5 for 2-D Hydrodynamic-Based Rainfall-Runoff Simulations at Basin Scale: Comparison with a State-of-the Art Model. Water. 2020; 12(9):2326. https://doi.org/10.3390/w12092326
Chicago/Turabian StyleCostabile, Pierfranco, Carmelina Costanzo, Domenico Ferraro, Francesco Macchione, and Gabriella Petaccia. 2020. "Performances of the New HEC-RAS Version 5 for 2-D Hydrodynamic-Based Rainfall-Runoff Simulations at Basin Scale: Comparison with a State-of-the Art Model" Water 12, no. 9: 2326. https://doi.org/10.3390/w12092326