Parameters Estimation and Prediction of Water Movement and Solute Transport in Layered, Variably Saturated Soils Using the Ensemble Kalman Filter


Abstract
:1. Introduction
- (i)
- Extend the EnKF framework to estimate the parameters of water movement and solute transport in layered, variably saturated soils with field sampling data.
- (ii)
- Improve the prediction accuracy of soil moisture and salinity status under field conditions.
2. Materials and Methods
2.1. Governing Equations for Water Flow and Solute Transport in Variably Saturated Soils
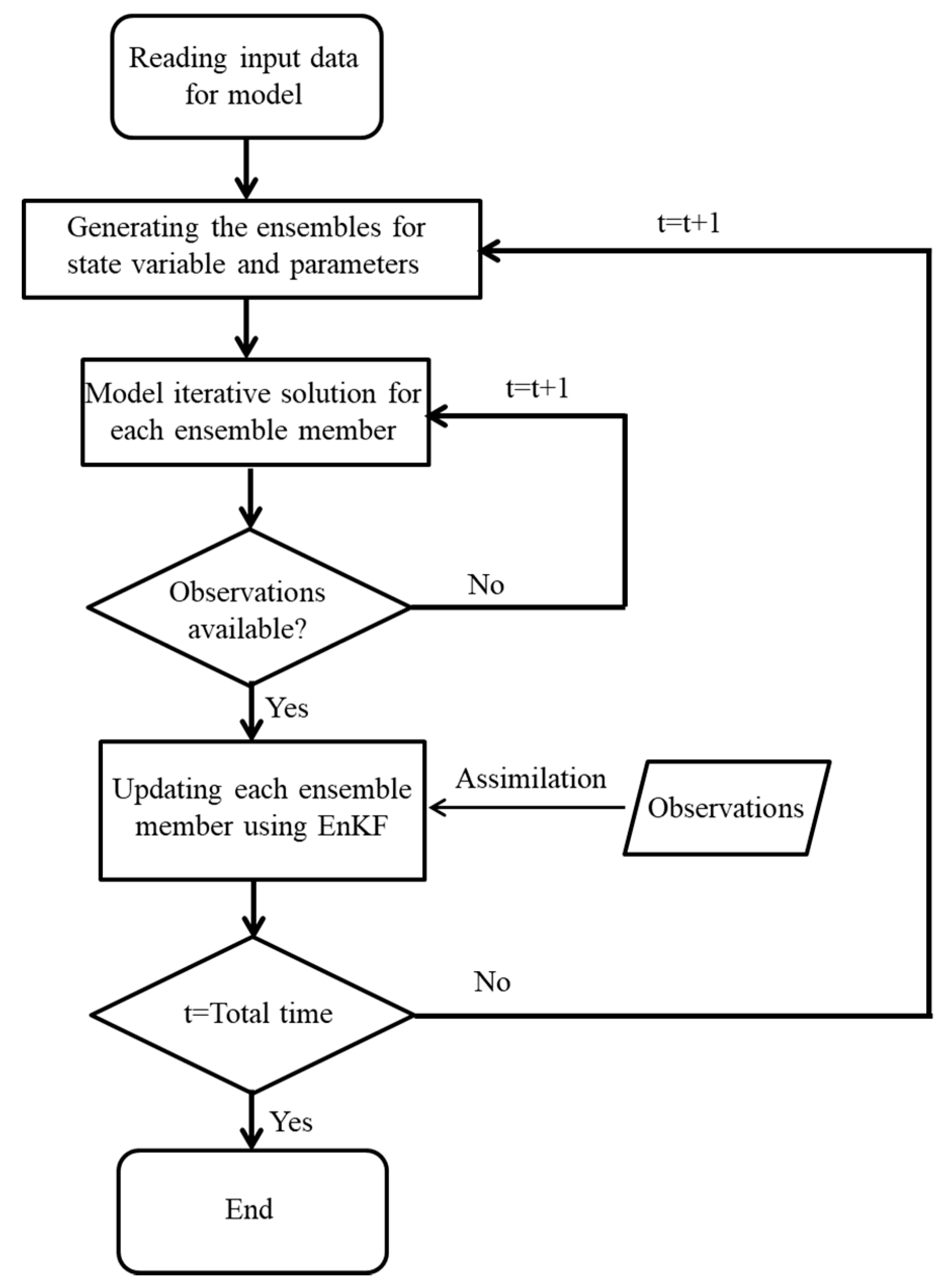
2.2. Framework of EnKF
2.3. Observations in Layered, Variably Saturated Soils under Field Conditions
2.4. Model Setup
2.5. Data Assimilation Procedure
2.6. Performance Metrics
3. Results
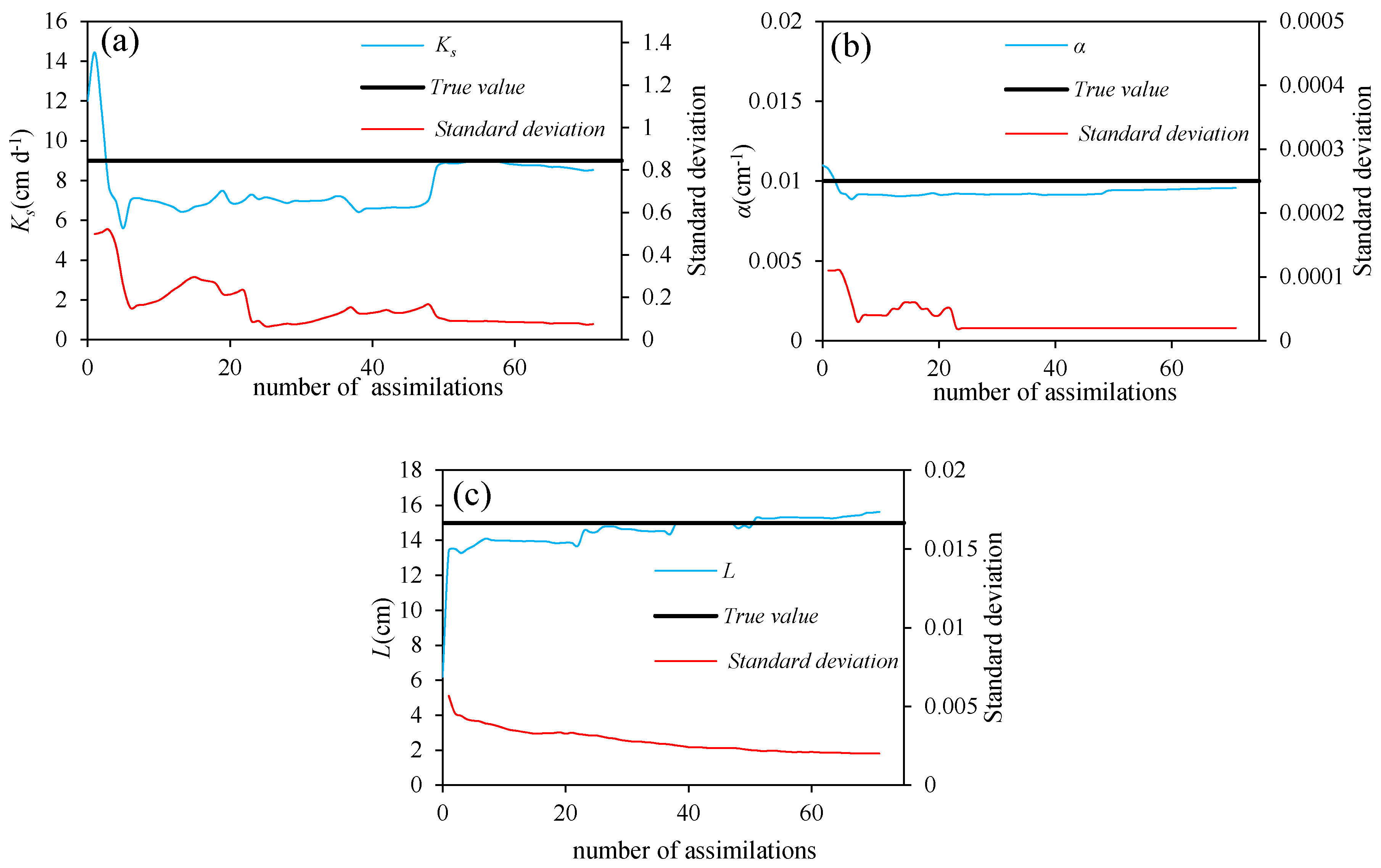
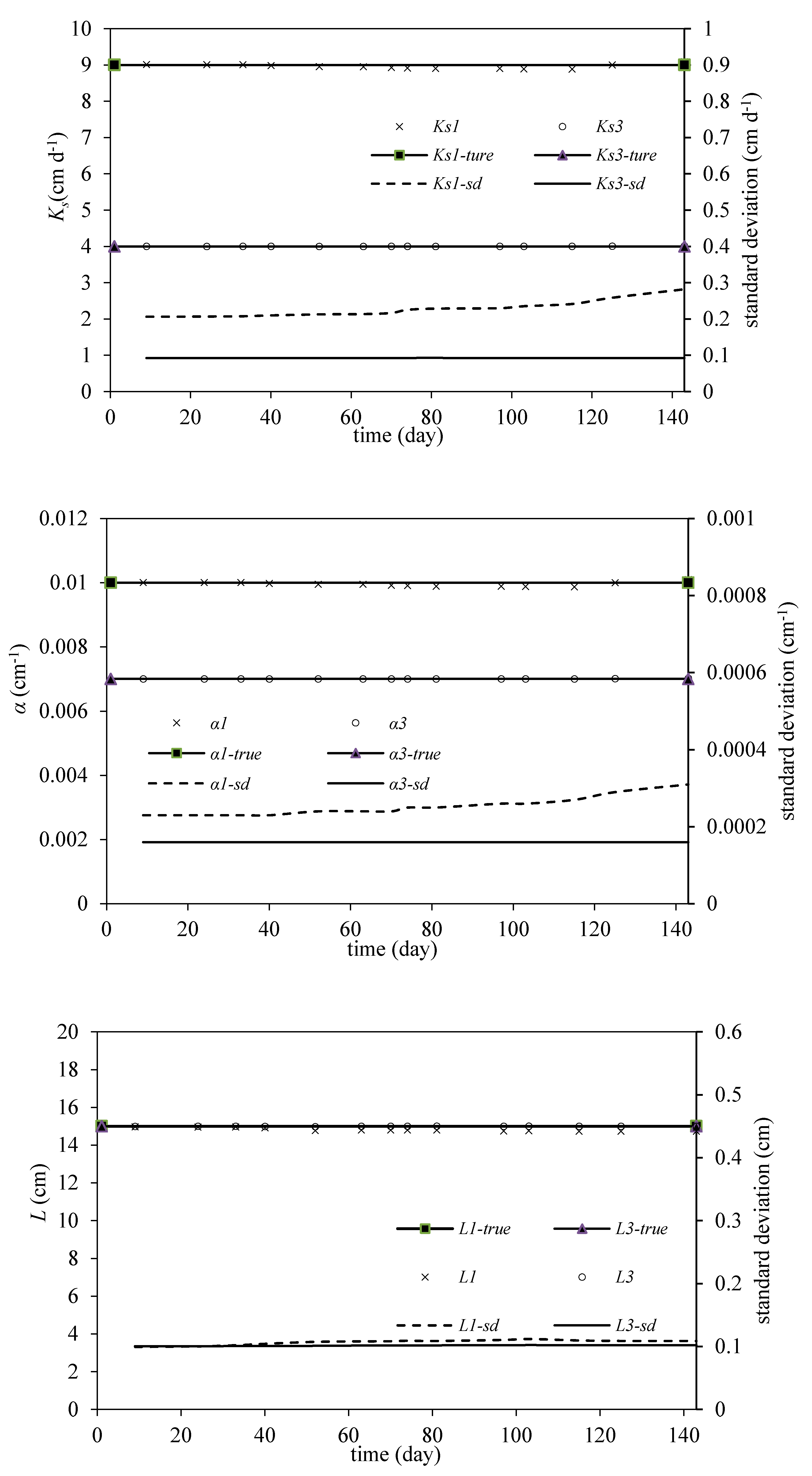
3.1. Parameter Estimation for Homogeneous Soil
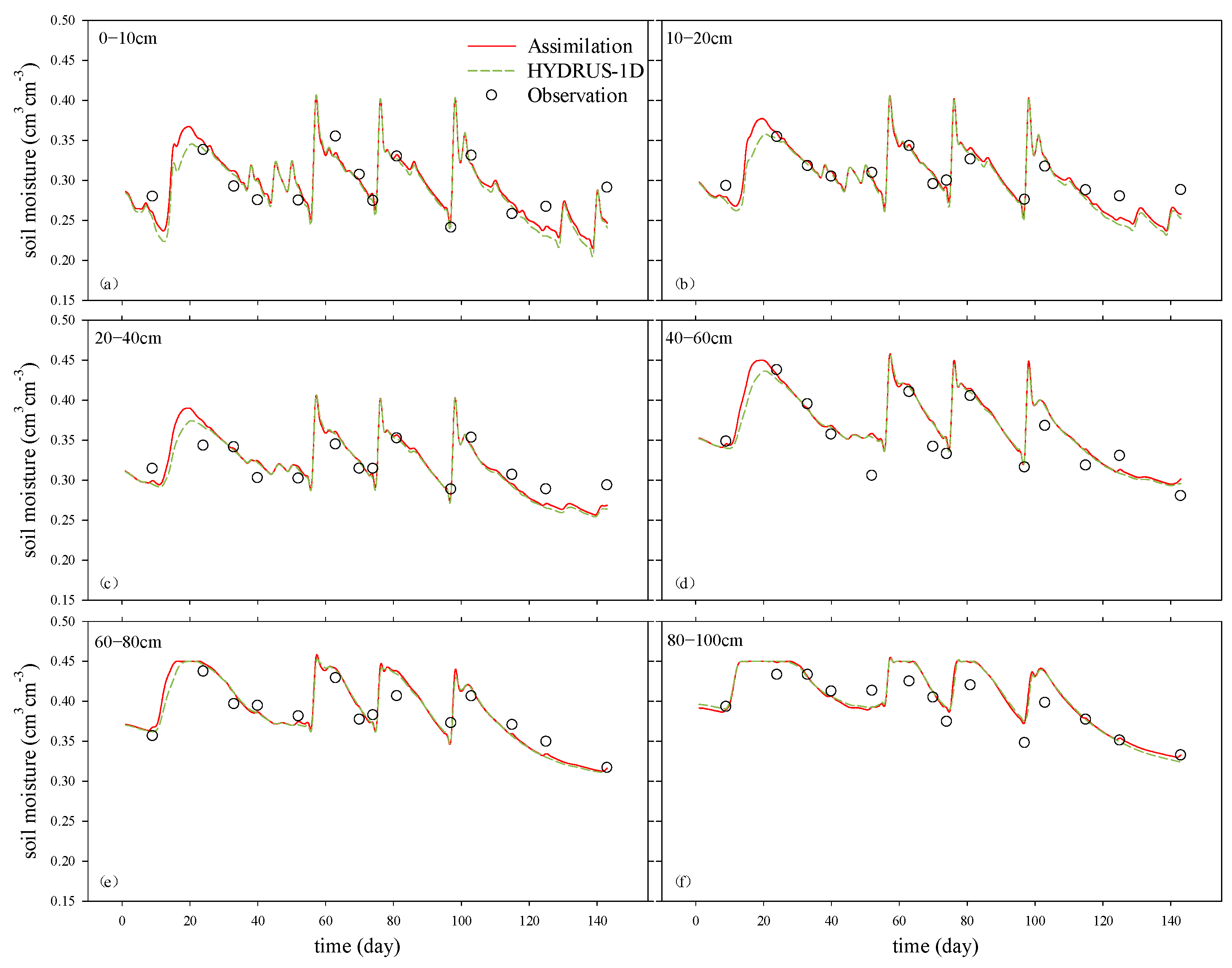
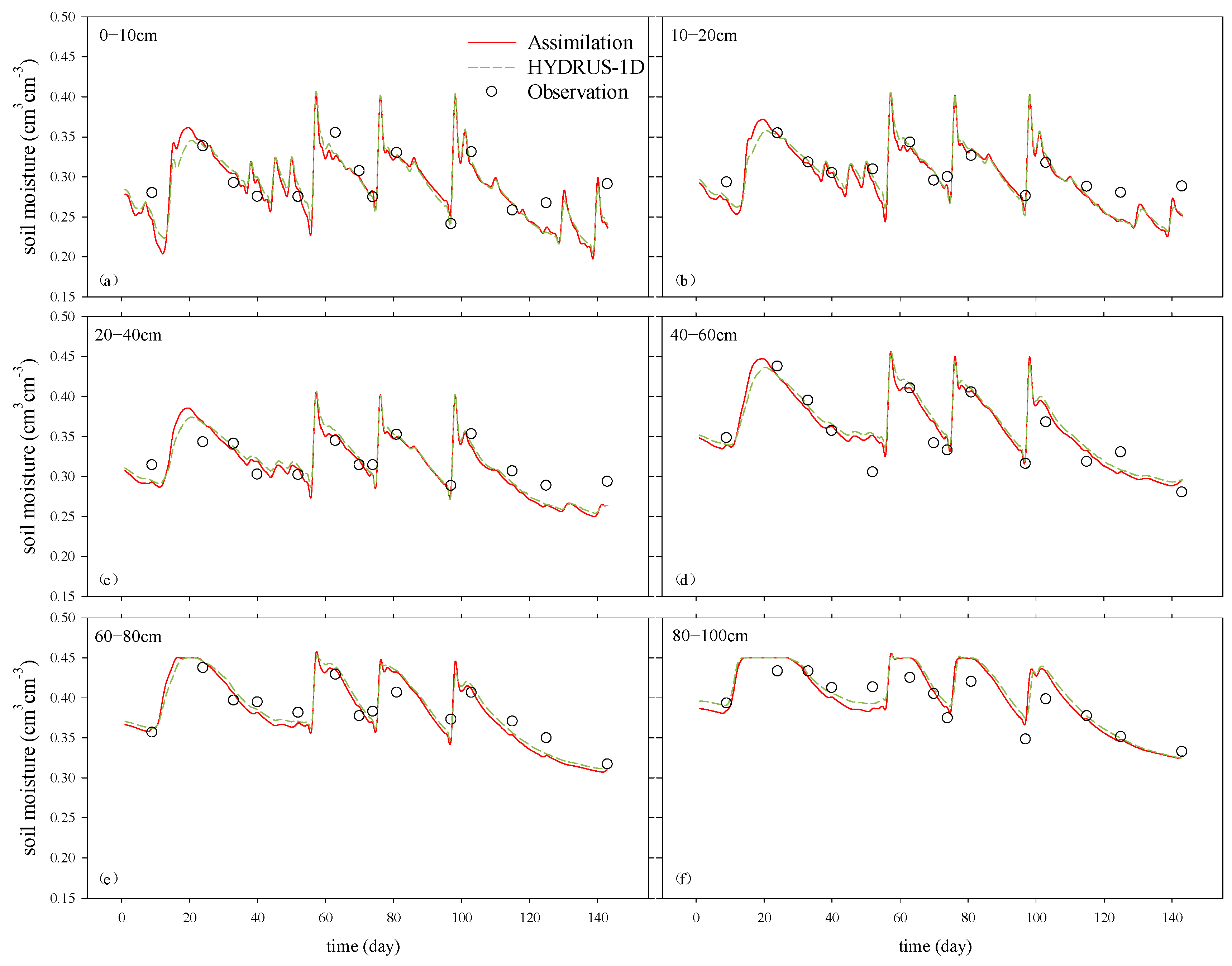
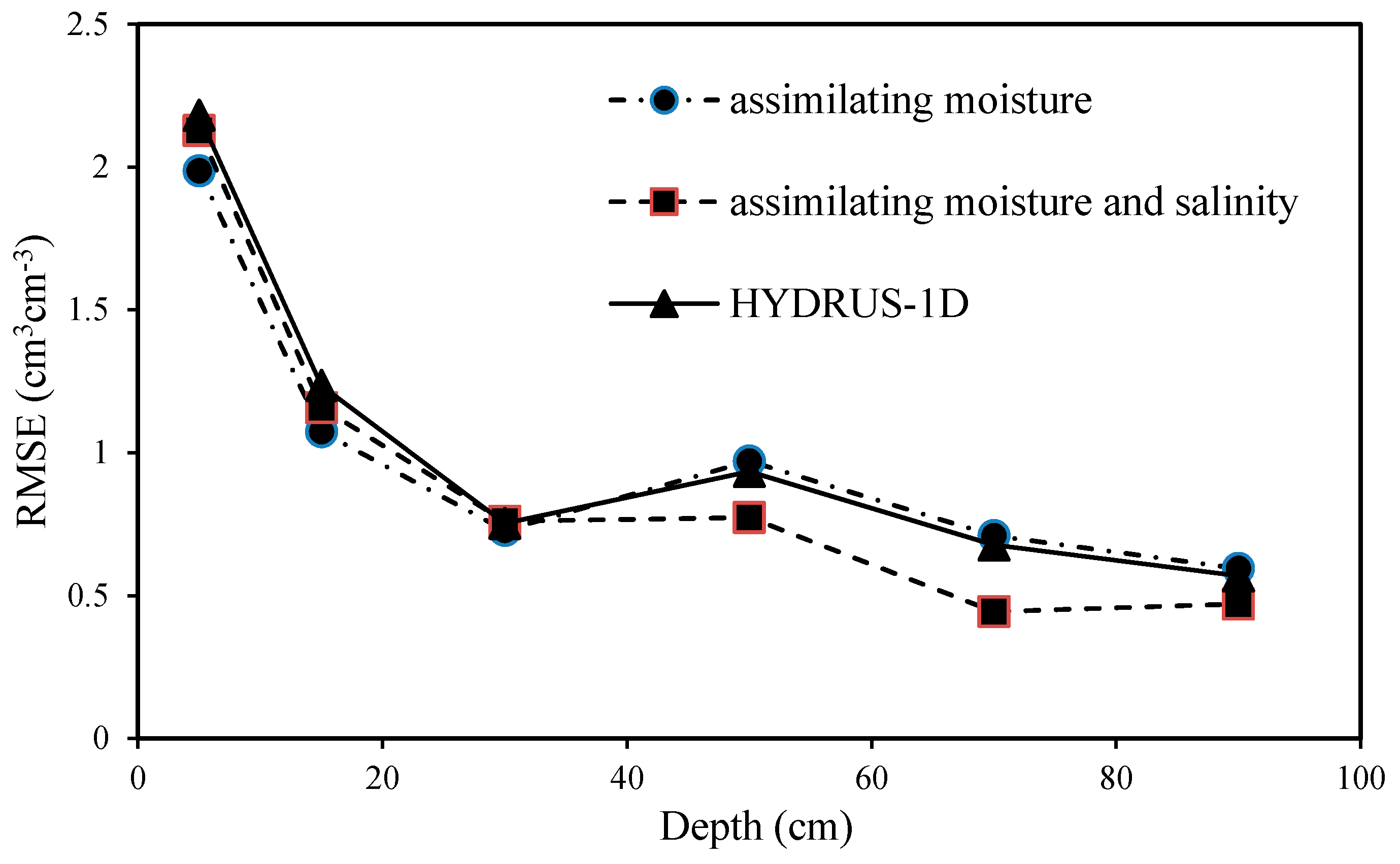
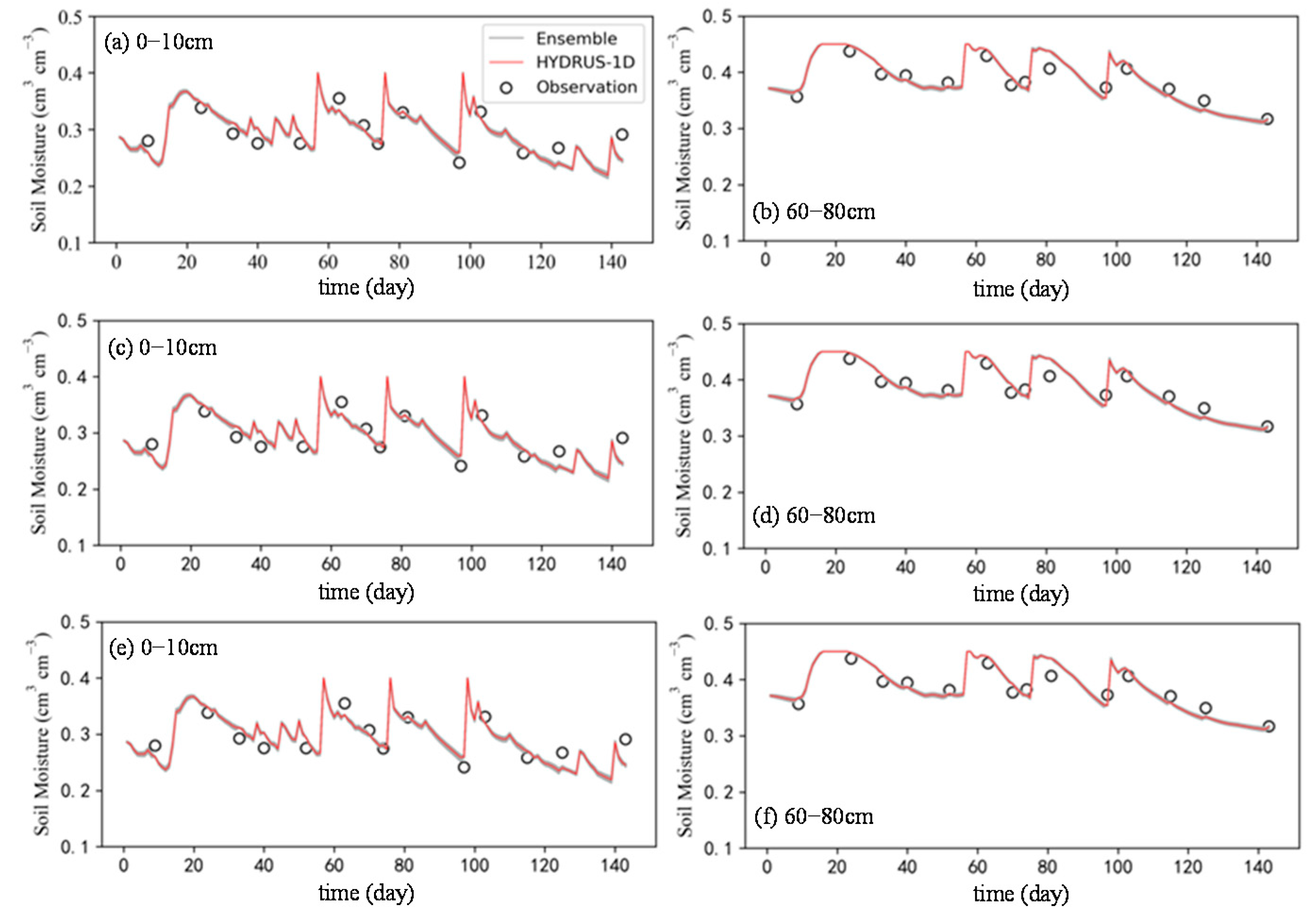
3.2. Water and Solute Dynamics Processes with Assimilation of Soil Moisture
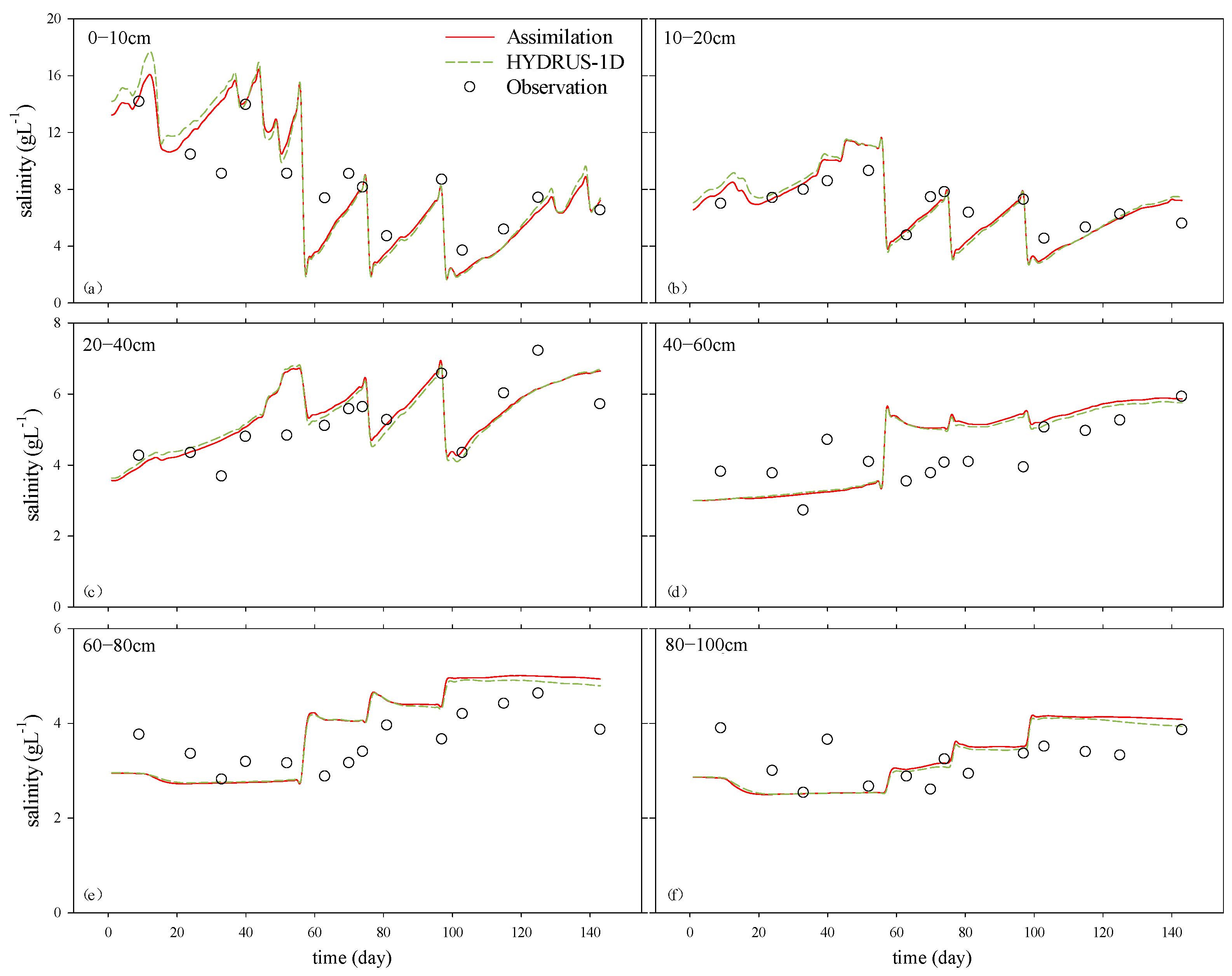
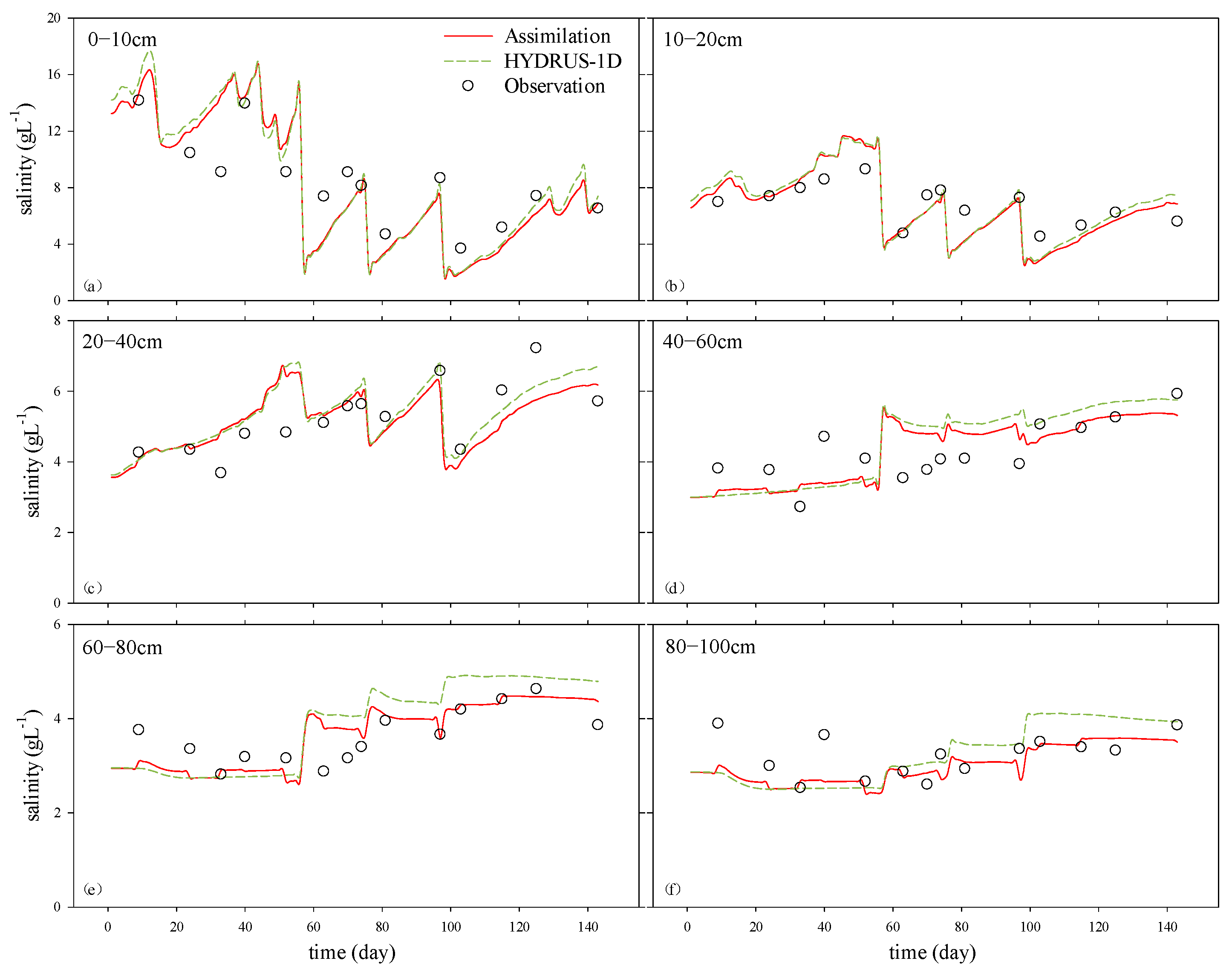
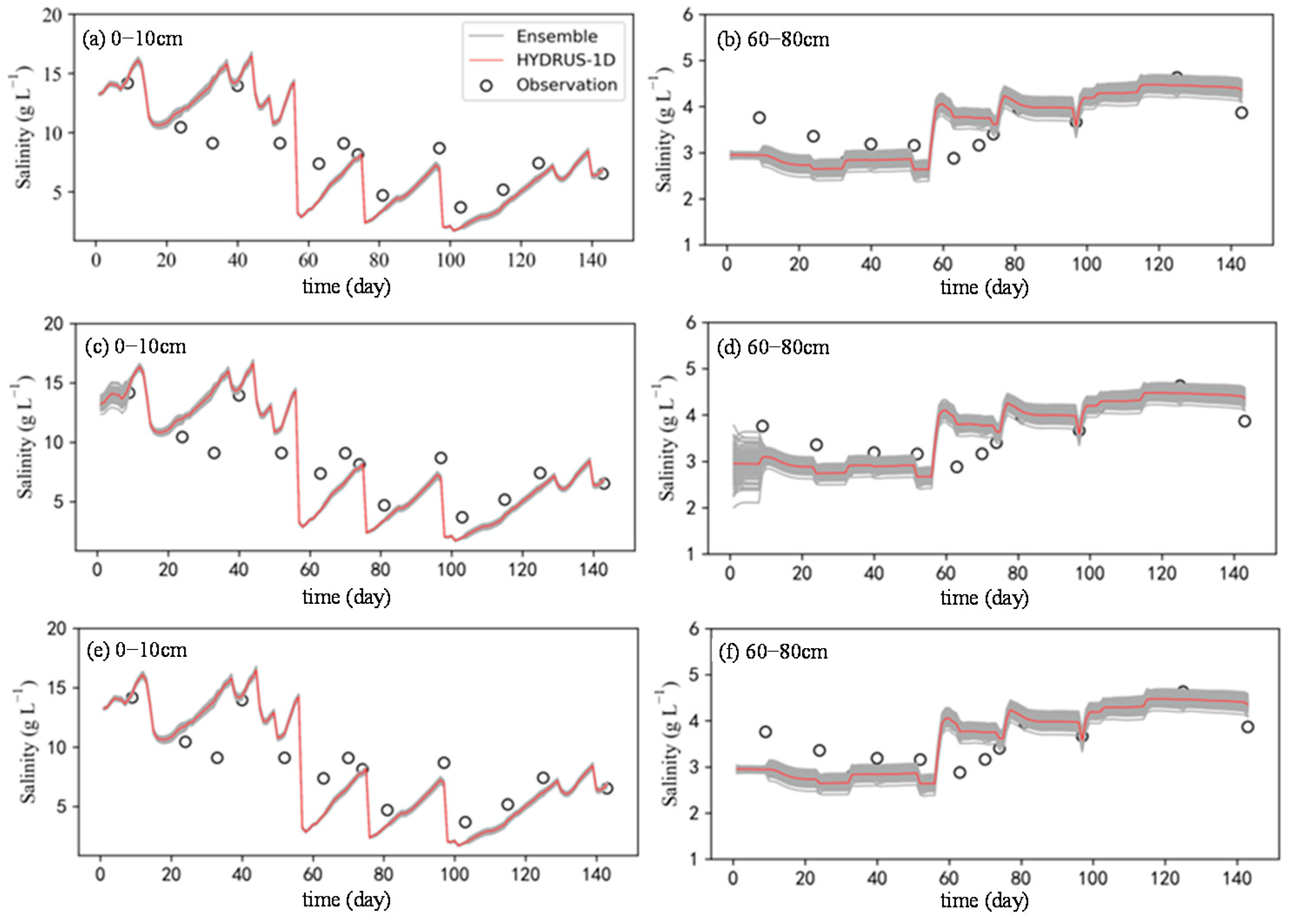
3.3. Water and Solute Dynamics Process for Assimilation of Soil Moisture, Salinity, and Parameters
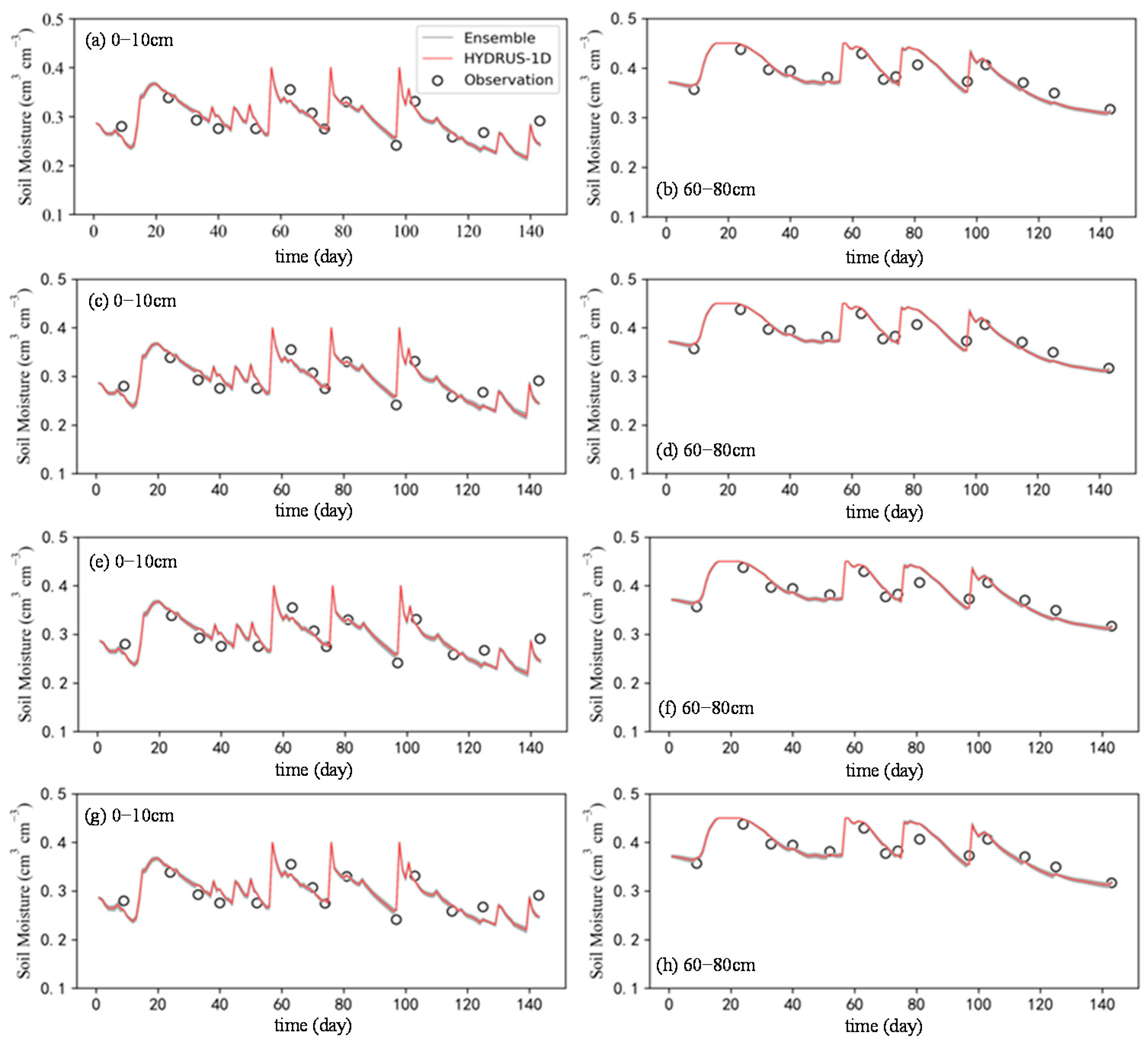
3.4. Impact of Initial Perturbation
3.5. Influence of Ensemble Size
4. Discussion
5. Conclusions
- The EnKF effectively estimates parameters and predicts state variables such as the soil moisture and salinity in layered, variably saturated soils when used with HYDRUS-1D. The reliability of the results was highly dependent on the proper selection of assimilating factors such as initial perturbation and ensemble size. A reasonable ensemble size range of 50–100 yields stable assimilation results when the EnKF is applied to highly nonlinear hydrological models such as that of this study.
- The simulation results for moisture could not be significantly improved through the assimilation of the soil moisture and relative parameters, but the simulation of the salinity was significantly improved through the assimilation of the salinity and relative solute-transport parameters.
- The bias of the EnKF simulation was primarily attributed to the uncertainties of the measurements from the sensor. High-quality onsite measured data improved the goodness-of-fit when the EnKF method was applied. Thus, the uncertainties of the data source are an important aspect to consider when the EnKF is applied to hydrological modeling, particularly when parameter estimation is required. Sparse observation data of field conditions benefits from the accurate measurement of states variables in the application of EnKF assimilation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vrugt, J.A.; Schoups, G.; Hopmans, J.W.; Young, C.; Wallender, W.W.; Harter, T.; Bouten, W. Inverse modeling of large-scale spatially distributed vadose zone properties using global optimization. Water Resour. Res. 2004, 40, 308–322. [Google Scholar] [CrossRef]
- Wood, A.W.; Lettenmaier, D.P. An ensemble approach for attribution of hydrologic prediction uncertainty. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef] [Green Version]
- Le Bourgeois, O.; Bouvier, C.; Brunet, P.; Ayral, P.A. Inverse modeling of soil water content to estimate the hydraulic properties of a shallow soil and the associated weathered bedrock. J. Hydrol. 2016, 541, 116–126. [Google Scholar] [CrossRef]
- Pan, F.; McKane, R.B.; Stieglitz, M. Identification of optimal soil hydraulic functions and parameters for predicting soil moisture. Hydrol. Sci. J. 2012, 57, 723–737. [Google Scholar] [CrossRef] [Green Version]
- Gharamti, M.; Ait-El-Fquih, B.; Hoteit, I. An iterative ensemble Kalman filter with one-step-ahead smoothing for state-parameters estimation of contaminant transport models. J. Hydrol. 2015, 527, 442–457. [Google Scholar] [CrossRef] [Green Version]
- Pan, L.; Wu, L. A hybrid global optimization method for inverse estimation of hydraulic parameters: Annealing-Simplex Method. Water Resour. Res. 1998, 34, 2261–2269. [Google Scholar] [CrossRef]
- Takeshita, Y.; Nakazawa, K.; Fukuda, D.; Kohno, I. Determination of unsaturated soil hydraulic properties from transient outflow experiments using genetic algorithms. Doboku Gakkai Ronbunshu 1999, 191–201. [Google Scholar] [CrossRef]
- Javaux, M.; Hupet, F.; Lambot, S.; Vanclooster, M. A global multilevel coordinate search procedure for estimating the unsaturated soil hydraulic properties. Water Resour. Res. 2002, 38, 6-1–6-15. [Google Scholar]
- Abbaspour, K.; Schulin, R.; Van Genuchten, M.; Van Genuchten, M. Estimating unsaturated soil hydraulic parameters using ant colony optimization. Adv. Water Resour. 2001, 24, 827–841. [Google Scholar] [CrossRef]
- Mertens, J.; Madsen, H.; Kristensen, M.; Jacques, D.; Feyen, J. Sensitivity of soil parameters in unsaturated zone modelling and the relation between effective, laboratory and in situ estimates. Hydrol. Process. 2005, 19, 1611–1633. [Google Scholar] [CrossRef]
- Schoups, G.; Hopmans, J.; Young, C.; Vrugt, J.; Wallender, W. Multi-criteria optimization of a regional spatially-distributed subsurface water flow model. J. Hydrol. 2005, 311, 20–48. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Robinson, B.A. Improved evolutionary optimization from genetically adaptive multimethod search. Proc. Natl. Acad. Sci. USA 2007, 104, 708–711. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vrugt, J.A.; Stauffer, P.H.; Wöhling, T.; Robinson, B.A.; Vesselinov, V.V. Inverse Modeling of Subsurface Flow and Transport Properties: A Review with New Developments. Vadose Zone J. 2008, 7, 843. [Google Scholar] [CrossRef]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. Space Phys. 1994, 99, 10143. [Google Scholar] [CrossRef]
- Entekhabi, D.; Dunne, S.; Margulis, S.A.; McLaughlin, D. Land data assimilation and estimation of soil moisture using measurements from the Southern Great Plains 1997 Field Experiment. Water Resour. Res. 2002, 38, 1299. [Google Scholar]
- Das, N.N.; Mohanty, B.P. Root Zone Soil Moisture Assessment Using Remote Sensing and Vadose Zone Modeling. Vadose Zone J. 2006, 5, 296. [Google Scholar] [CrossRef]
- Huang, C.; Hu, B.X.; Li, X.; Ye, M. Using data assimilation method to calibrate a heterogeneous conductivity field and improve solute transport prediction with an unknown contamination source. Stoch. Env. Res. Risk A 2009, 23, 1155–1167. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, D. Data assimilation for distributed hydrological catchment modeling via ensemble Kalman filter. Adv. Water Resour. 2010, 33, 678–690. [Google Scholar] [CrossRef]
- Li, L.; Zhou, H.; Franssen, H.J.H.; Gómez-Hernández, J.J.; Gómez-Hernández, J.J.; Gómez-Hernández, J.J. Modeling transient groundwater flow by coupling ensemble Kalman filtering and upscaling. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef] [Green Version]
- Wanders, N.; Karssenberg, D.; De Roo, A.; De Jong, S.; Bierkens, M.F.P. The suitability of remotely sensed soil moisture for improving operational flood forecasting. Hydrol. Earth Syst. Sci. 2014, 18, 2343–2357. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Kurtz, W.; Kollet, S.; Vereecken, H.; Franssen, H.J.H. Comparison of different assimilation methodologies of groundwater levels to improve predictions of root zone soil moisture with an integrated terrestrial system model. Adv. Water Resour. 2018, 111, 224–238. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Diks, C.G.H.; Gupta, H.V.; Bouten, W.; Verstraten, J.M. Improved treatment of uncertainty in hydrologic modeling: Combining the strengths of global optimization and data assimilation. Water Resour. Res. 2005, 41, 1–17. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, D. Data assimilation for transient flow in geologic formations via ensemble Kalman filter. Adv. Water Resour. 2006, 29, 1107–1122. [Google Scholar] [CrossRef]
- Franssen, H.J.H.; Kaiser, H.P.; Kuhlmann, U.; Bauser, G.; Stauffer, F.; Muller, R.; Kinzelbach, W. Operational real-time modeling with ensemble Kalman filter of variably saturated subsurface flow including stream-aquifer interaction and parameter updating. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef]
- Man, J.; Zheng, Q.; Wu, L.; Zeng, L. Improving parameter estimation with an efficient sequential probabilistic collocation-based optimal design method. J. Hydrol. 2019, 569, 1–11. [Google Scholar] [CrossRef]
- Wu, C.C.; Margulis, S.A. Real-Time Soil Moisture and Salinity Profile Estimation Using Assimilation of Embedded Sensor Datastreams. Vadose Zone J. 2013, 12. [Google Scholar] [CrossRef]
- Li, C.; Ren, L. Estimation of Unsaturated Soil Hydraulic Parameters Using the Ensemble Kalman Filter. Vadose Zone J. 2011, 10, 1205–1227. [Google Scholar] [CrossRef]
- Song, X.; Shi, L.; Ye, M.; Yang, J.; Navon, I.M. Numerical Comparison of Iterative Ensemble Kalman Filters for Unsaturated Flow Inverse Modeling. Vadose Zone J. 2014, 13. [Google Scholar] [CrossRef]
- Gharamti, M.; Valstar, J.; Hoteit, I. An adaptive hybrid EnKF-OI scheme for efficient state-parameter estimation of reactive contaminant transport models. Adv. Water Resour. 2014, 71, 1–15. [Google Scholar] [CrossRef]
- Šimůnek, J.; Šejna, M.; Saito, H. The HYDRUS-1D Software Package for Simulating the Movement of Water, Heat, and Multiple Solutes in Variably-Saturated Media, version 4.08; HYDRUS Software Series 3; Department of Environmental Sciences, University of California Riverside: Riverside, CA, USA, 2009; p. 315. [Google Scholar]
- Van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. 1980, 5, 892–898. [Google Scholar] [CrossRef]
- Mualem, Y. A new model for predicting the hydraulic conductivity of unsaturated porous media. Water Resour. Res. 1976, 12, 513–522. [Google Scholar] [CrossRef] [Green Version]
- Evensen, G. The Ensemble Kalman Filter: Theoretical formulation and practical implementation. Ocean. Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Ren, D.; Xu, X.; Hao, Y.; Huang, G. Modeling and assessing field irrigation water use in a canal system of Hetao, upper Yellow River basin: Application to maize, sunflower and watermelon. J. Hydrol. 2016, 532, 122–139. [Google Scholar] [CrossRef]
- LeGates, D.R.; McCabe, G.J. Evaluating the use of “goodness-of-fit” Measures in hydrologic and hydroclimatic model validation. Water Resour. Res. 1999, 35, 233–241. [Google Scholar] [CrossRef]
- Moriasi, D.N.; Arnold, J.G.; Van Liew, M.W.; Bingner, R.L.; Harmel, R.D.; Veith, T.L. Model Evaluation Guidelines for Systematic Quantification of Accuracy in Watershed Simulations. Trans. ASABE 2007, 50, 885–900. [Google Scholar] [CrossRef]
- Nash, J.; Sutcliffe, J. River flow forecasting through conceptual models part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Depth (cm) | θr (cm3 cm−3) | θs (cm3 cm−3) | α (cm−1) | n (-) | Ks (cm d−1) | l (-) | L (cm) | Soil Texture |
|---|---|---|---|---|---|---|---|---|
| 0–50 | 0.05 | 0.42 | 0.010 | 1.70 | 9 | 0.5 | 15 | Silt loam |
| 50–150 | 0.04 | 0.47 | 0.012 | 1.50 | 15 | 0.5 | 15 | Silt loam |
| 150–240 | 0.07 | 0.50 | 0.007 | 1.20 | 4 | 0.5 | 15 | Silt loam |
| 240–300 | 0.03 | 0.45 | 0.012 | 1.70 | 25 | 0.5 | 15 | Silt loam |
| Parameter | Description | Values (cm) |
|---|---|---|
| h1 | No water extraction at higher pressure heads | −0.1 |
| h2 | h below which optimal water starts | −15 |
| h3h | h below which water uptake reduction starts at high atmospheric demand | −325 |
| h3l | h below which water uptake reduction starts at low atmospheric demand | −450 |
| h4 | h below which water uptake is zero | −8000 |
| h*φ | Threshold value of hφ | −2000 |
| h*φ50 | hφ at which water uptake is reduced by 50% | −6000 |
| Factors | Values |
|---|---|
| Initial estimate of Ks (cm/day) | 12 |
| Initial estimate of α (cm−1) | 0.011 |
| Initial estimate of L (cm) | 6.2 |
| Initial standard deviation of lnKs | 0.1 |
| Initial standard deviation of lnα | 0.01 |
| Initial standard deviation of L | 0.1 |
| Model standard deviation of water content | 0.001 |
| Model standard deviation of salinity | 0.01 |
| Observation standard deviation of water content | 0.0004 |
| Observation standard deviation of salinity | 0.0004 |
| Initial standard deviation of water content | 0.001 |
| Initial standard deviation of salinity | 0.01 |
| Indicator | Original Simulation | Assimilating Soil Moisture | Assimilating Soil Moisture and Salinity |
|---|---|---|---|
| RMSE (cm3 cm−3) | 1.191 | 1.113 | 1.116 |
| MRE (%) | −3.345 | −3.579 | 1.708 |
| NSE | 0.741 | 0.743 | 0.772 |
| R2 | 0.822 | 0.830 | 0.834 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Z.; Huang, Q.; Li, G.; Li, G. Parameters Estimation and Prediction of Water Movement and Solute Transport in Layered, Variably Saturated Soils Using the Ensemble Kalman Filter. Water 2019, 11, 1520. https://doi.org/10.3390/w11071520
Jiang Z, Huang Q, Li G, Li G. Parameters Estimation and Prediction of Water Movement and Solute Transport in Layered, Variably Saturated Soils Using the Ensemble Kalman Filter. Water. 2019; 11(7):1520. https://doi.org/10.3390/w11071520
Chicago/Turabian StyleJiang, Zheng, Quanzhong Huang, Gendong Li, and Guangyong Li. 2019. "Parameters Estimation and Prediction of Water Movement and Solute Transport in Layered, Variably Saturated Soils Using the Ensemble Kalman Filter" Water 11, no. 7: 1520. https://doi.org/10.3390/w11071520