Visible Light Communication System for Offshore Wind Turbine Foundation Scour Early Warning Monitoring

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Underwater VLC Turbidity and Velocity Characteristics
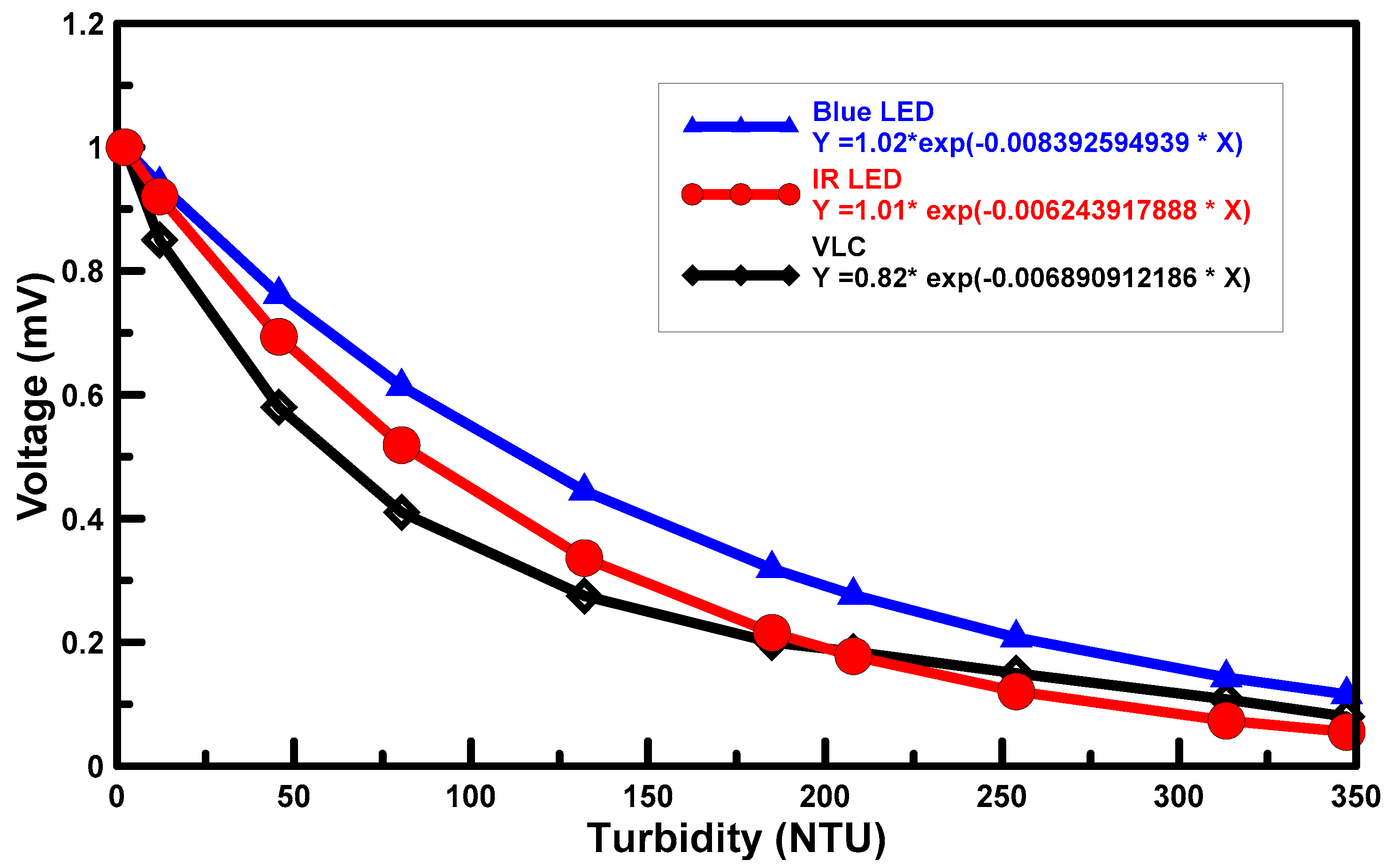
2.1. Water Turbidity Measurement
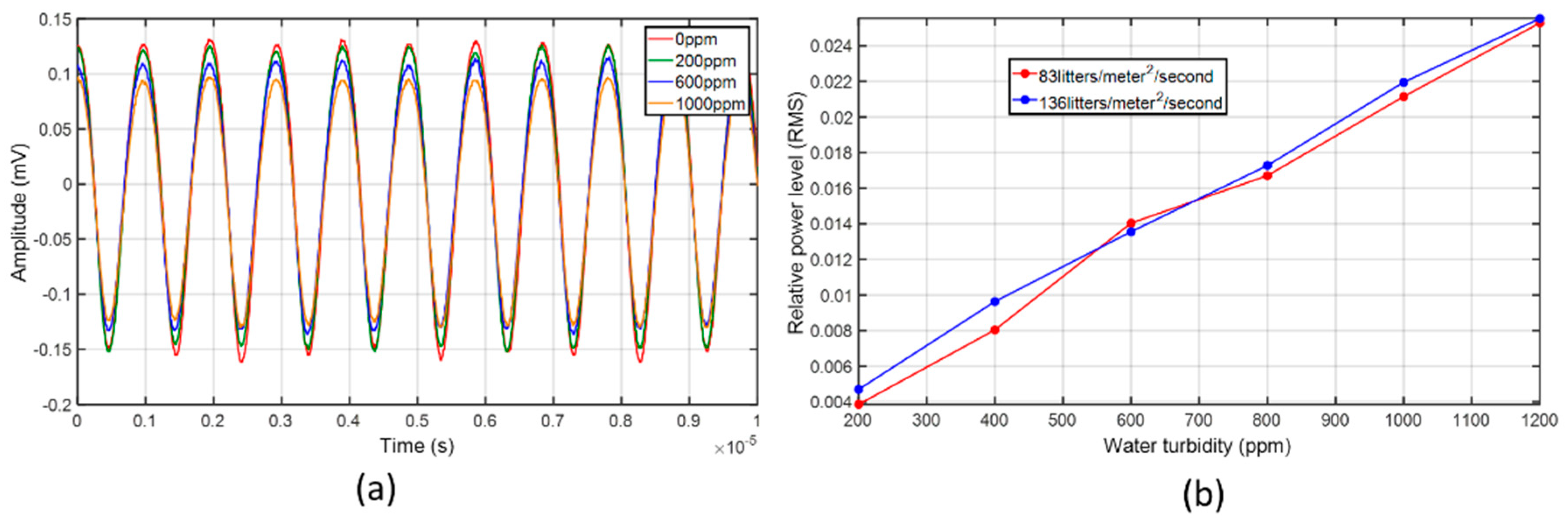
2.2. Water Flow Velocity Measurement
2.3. Experimental Setup for Water Turbidity Measurement
2.4. Experimental Setup for Water Flow Velocity Measurement
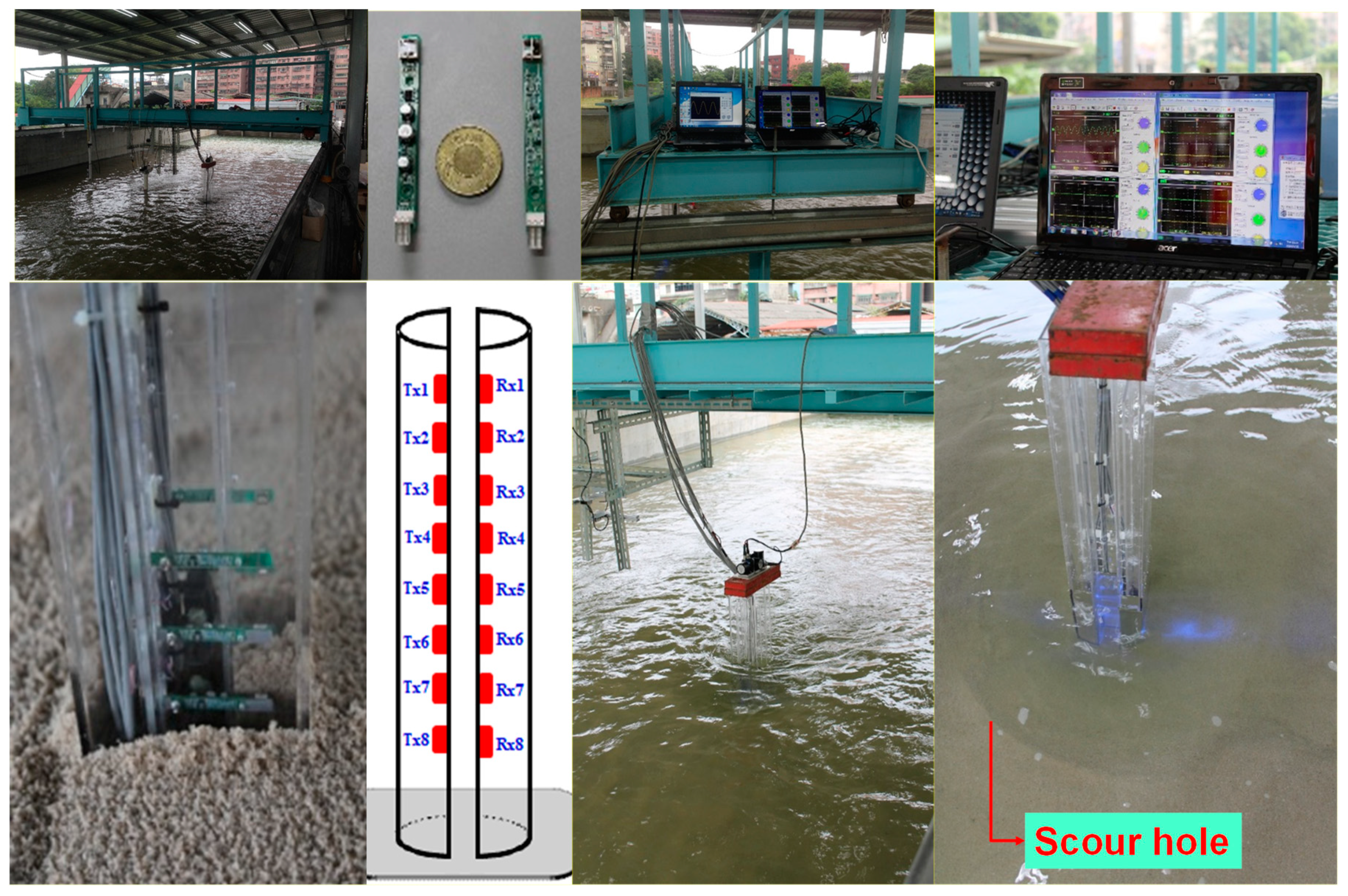
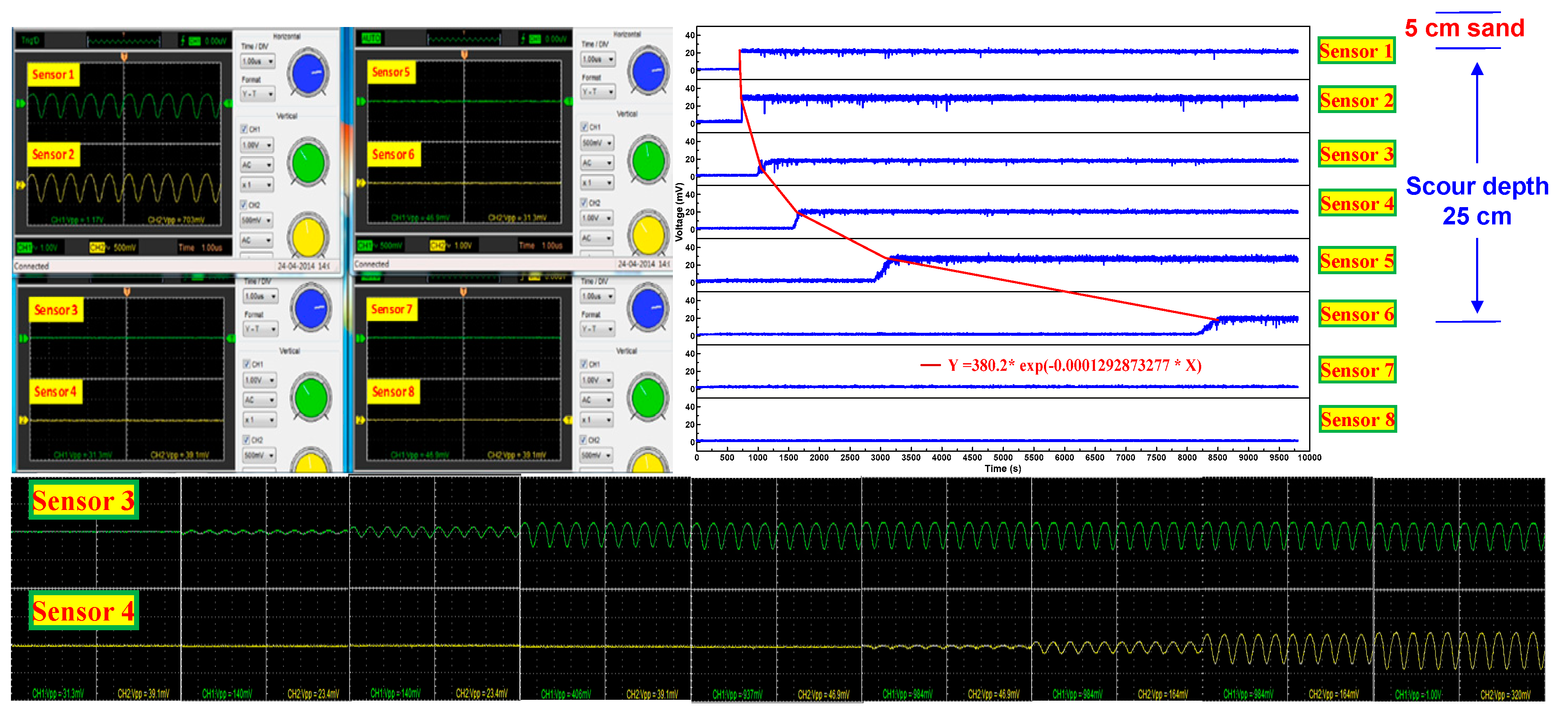
3. VLC Scour Experiment
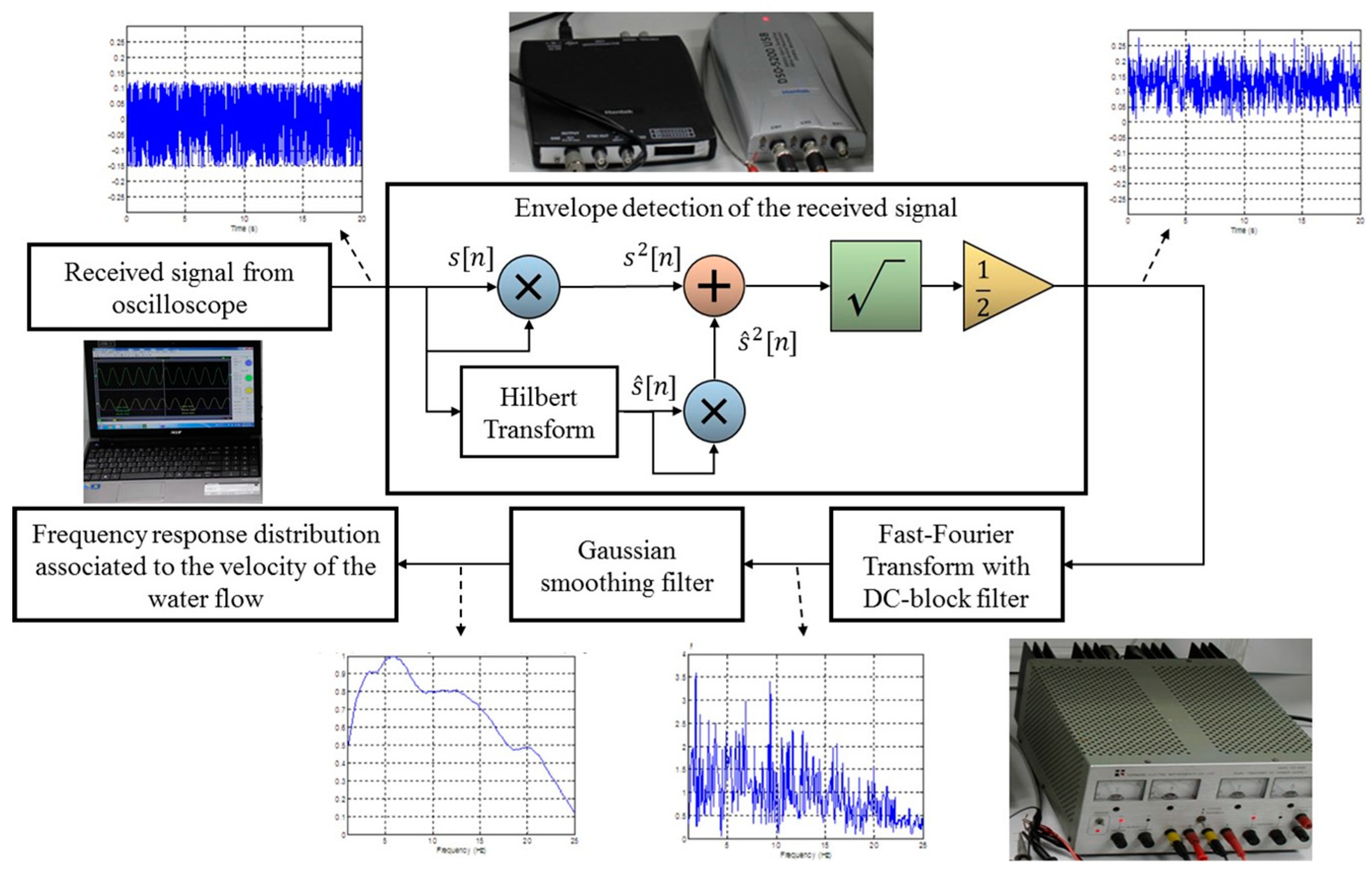
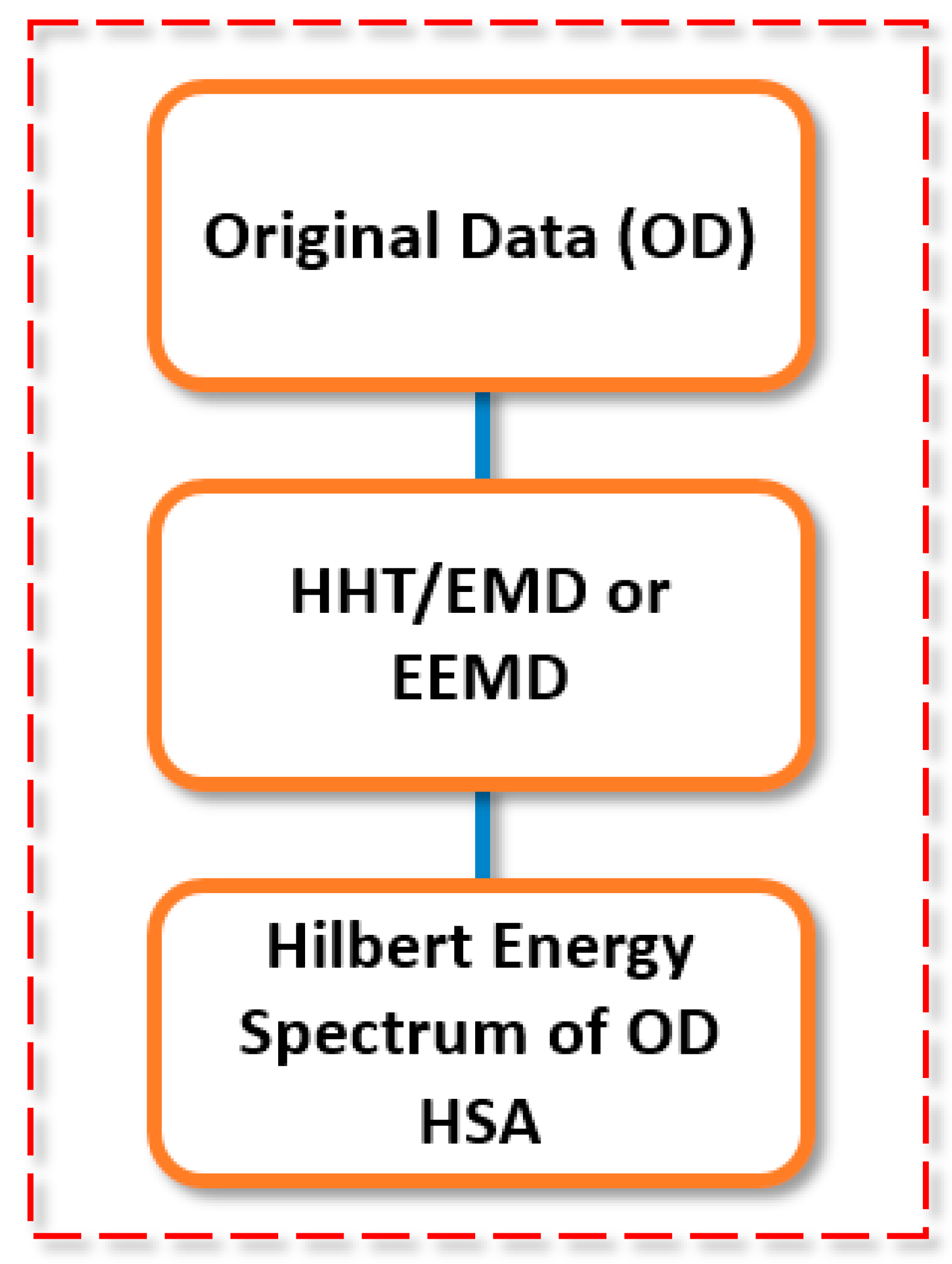
4. HHT and Data Analysis
4.1. Instantaneous Frequency
4.2. Empirical Mode Decomposition
4.3. Ensemble EMD
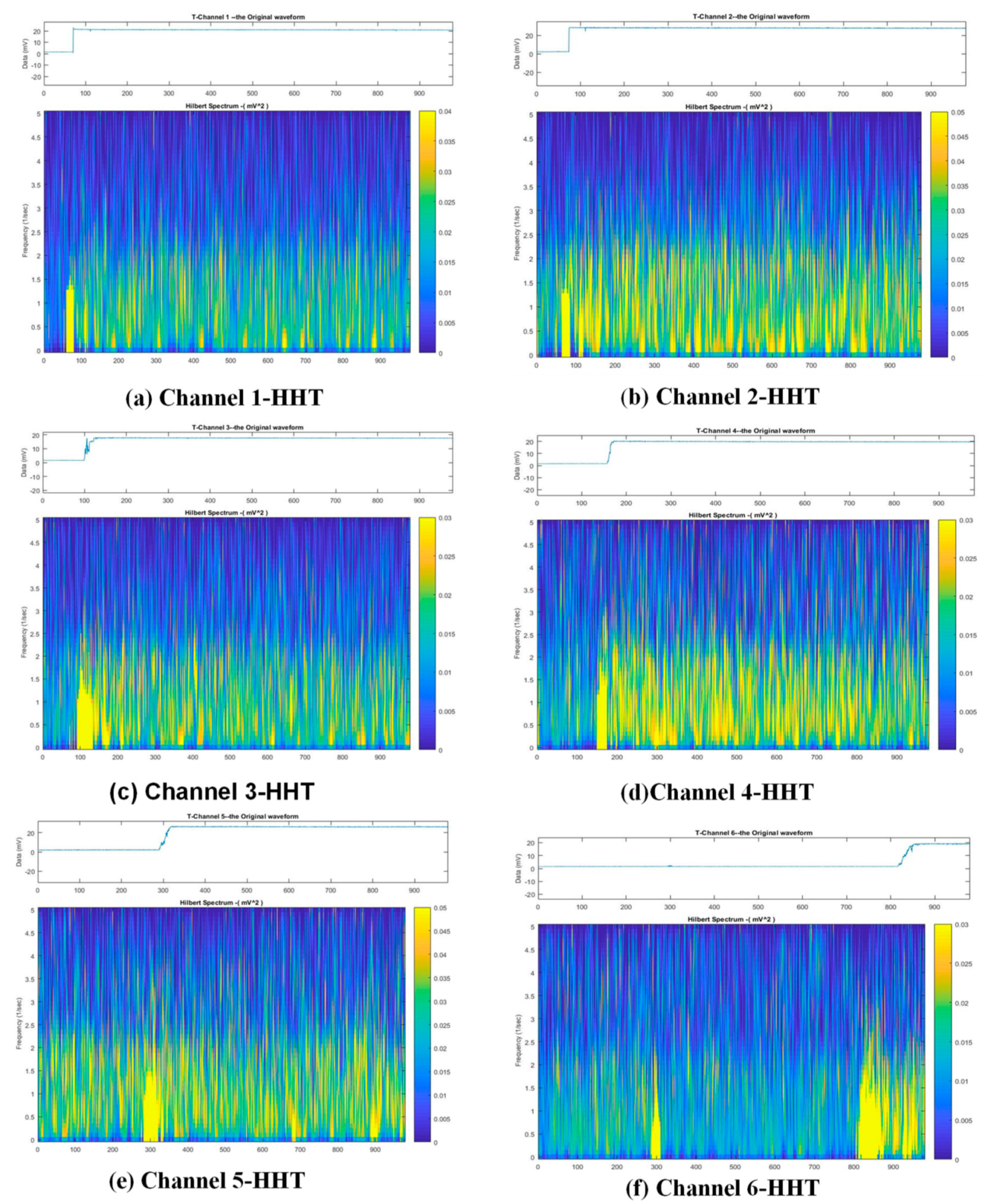
4.4. Hilbert Spectrum
4.5. Analysis Results
5. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Igwemeziea, V.; Mehmanparasta, A.; Koliosa, A. Current trend in offshore wind energy sector and material requirements for fatigue resistance improvement in large wind turbine support structures—A review. Renew. Sustain. Energy Rev. 2019, 101, 181–196. [Google Scholar] [CrossRef]
- Willis, D.J.; Niezrecki, C.; Kuchma, D.; Hines, E.; Arwade, S.R.; Barthelmie, R.J.; DiPaola, M.; Drane, P.J.; Hansen, C.J.; Inalpolat, M.; et al. Wind energy research: State-of-the-art and future research directions. Renew. Energy 2018, 125, 133–154. [Google Scholar] [CrossRef]
- Ma, H.; Yang, J.; Chen, L. Effect of scour on the structural response of an offshore wind turbine supported on tripod foundation. Appl. Ocean Res. 2018, 73, 179–189. [Google Scholar] [CrossRef]
- Li, H.; Ong, M.C.; Leira, B.J.; Myrhaug, D. Effects of soil profile variation and scour on structural response of an offshore monopile wind turbine. J. Offshore Mech. Arct. Eng. 2018, 140, 042001. [Google Scholar] [CrossRef]
- Chiew, Y.M.; Melville, B.W. Local scour around bridge piers. J. Hydraul. Eng. ASCE 1987, 25, 15–26. [Google Scholar] [CrossRef]
- Melville, B.W.; Chiew, Y.M. Time scale for local scour at bridge piers. J. Hydraul. Eng. ASCE 1999, 125, 59–65. [Google Scholar] [CrossRef]
- Melville, B.W. Pier and abutment scour: Integrated approach. J. Hydraul. Eng. ASCE 1997, 123, 125–136. [Google Scholar] [CrossRef]
- Briaud, J.L.; Ting, F.C.K.; Chen, H.C. Erosion function apparatus for scour rate predictions. J. Geotech. Geoenviron. Eng. 2001, 127, 105–113. [Google Scholar] [CrossRef]
- Briaud, J.L.; Ting, F.C.K.; Chen, H.C. SRICOS: Prediction of scour rate in cohesive soils at bridge piers. J. Geotech. Geoenviron. Eng. 1999, 125, 237–246. [Google Scholar] [CrossRef]
- Shirole, A.M. Bridge management to the Year 2020 and beyond. Transp. Res. Rec. 2010, 2202, 159–164. [Google Scholar] [CrossRef]
- Lagasse, P.F.; Richardson, E.V. ASCE compendium of stream stability and bridge scour papers. J. Hydraul. Eng. ASCE 2001, 127, 531–533. [Google Scholar] [CrossRef]
- Wardhana, K.; Hadipriono, F.C. Analysis of recent bridge failures in the United States. J. Perform. Constr. Facil. 2003, 17, 144–150. [Google Scholar] [CrossRef]
- Roulund, A.; Sumer, B.M.; Fredsoe, J. Numerical and experimental investigation of flow and scour around a circular pile. J. Fluid Mech. 2005, 534, 351–401. [Google Scholar] [CrossRef]
- Lin, Y.B.; Chen, J.C.; Chang, K.C. Real-time monitoring of local scour by using fiber Bragg grating sensors. Smart Mater. Struct. 2005, 14, 664–670. [Google Scholar] [CrossRef]
- Lin, Y.B.; Lai, J.S.; Chang, K.C. Flood scour monitoring system using fiber Bragg grating sensors. Smart Mater. Struct. 2006, 15, 1950–1959. [Google Scholar] [CrossRef]
- Lin, Y.B.; Lai, J.S.; Chang, K.C.; Chang, W.Y.; Lee, F.Z.; Tan, Y.C. Using MEMS sensors in the bridge scour monitoring system. J. Chin. Inst. Eng. 2010, 33, 25–35. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Gavin, K. A review of bridge scour monitoring techniques. J. Rock Mech. Geotech. Eng. 2014, 6, 138–149. [Google Scholar] [CrossRef]
- Luengo, J.; Negro, V.; Garcia-Barba, J. New detected uncertainties in the design of foundations for offshore Wind Turbines. Renew. Energy 2019, 131, 667–677. [Google Scholar] [CrossRef]
- Oliveira, G.; Magalhaes, F.; Cunha, A. Vibration-based damage detection in a wind turbine using 1 year of data. Struct. Control Health Monit. 2018, 25, 1–22. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Gavin, K.; Doherty, P. An investigation into the effect of scour on the natural frequency of an offshore wind turbine. Ocean Eng. 2015, 101, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Tseng, W.C.; Kuo, Y.S.; Lu, K.C.; Chen, J.W.; Chung, C.F.; Chen, R.C. Effect of scour on the natural frequency responses of the meteorological mast in the Taiwan Strait. Energies 2018, 11, 823. [Google Scholar] [CrossRef]
- Tseng, W.C.; Kuo, Y.S.; Chen, J.W. An investigation into the effect of scour on the loading and deformation responses of monopile foundations. Energies 2017, 10, 1190. [Google Scholar] [CrossRef]
- Chen, W.I.; Wong, B.L.; Lin, Y.H.; Chau, S.W.; Huang, H.H. Design and analysis of jacket substructures for offshore wind turbines. Energies 2016, 9, 264. [Google Scholar] [CrossRef]
- Yang, W.; Tian, W. Concept research of a countermeasure device for preventing scour around the monopole foundations of offshore wind turbines. Energies 2018, 11, 2593. [Google Scholar] [CrossRef]
- Yu, T.; Lian, J.; Shi, Z. Experimental investigation of current-induced local scour around composite bucket foundation in silty sand. Ocean Eng. 2016, 117, 311–320. [Google Scholar] [CrossRef]
- Esteban, M.D.; Counago, B.; Lopez-Gutierrez, J.S. Gravity based support structures for offshore wind turbine generators: Review of the installation process. Ocean Eng. 2015, 110, 281–291. [Google Scholar] [CrossRef]
- McGovern, D.J.; Ilic, S.; Folkard, A.M. Time development of scour around a cylinder in simulated tidal currents. J. Hydraul. Eng. 2014, 140, 04014014. [Google Scholar] [CrossRef]
- Michalis, P.; Saafi, M.; Judd, M. Capacitive sensors for offshore scour monitoring. Proc. Inst. Civ. Eng. Energy 2013, 166, 189–196. [Google Scholar] [CrossRef]
- Harris, J.M.; Whitehouse, R.J.S.; Benson, T. The time evolution of scour around offshore structures. Proc. Inst. Civ. Eng. Energy Marit. Eng. 2010, 163, 3–17. [Google Scholar] [CrossRef] [Green Version]
- Ong, M.C.; Trygsland, E.; Myrhaug, D. Numerical study of seabed boundary layer flow around monopile and gravity-based wind turbine foundations. J. Offshore Mech. Arct. Eng. 2017, 139, 042001. [Google Scholar]
- Oh, K.Y.; Nam, W.; Ryu, M.S.; Kim, J.Y.; Epureanu, B.I. A review of foundations of offshore wind energy convertors: Current status and future perspectives. Renew. Sustain. Energy Rev. 2018, 88, 16–36. [Google Scholar] [CrossRef]
- Guan, D.W.; Chiew, Y.M.; Melville, B.W.; Zheng, J.H. Current-induced scour at monopile foundations subjected to lateral vibrations. Coast. Eng. 2019, 144, 15–21. [Google Scholar] [CrossRef]
- Petersen, T.U. Scour around Offshore Wind Turbine Foundations. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2014. [Google Scholar]
- Prendergast, L.J.; Reale, C.; Gavin, K. Probabilistic examination of the change in eigen frequencies of an offshore wind turbine under progressive scour incorporating soil spatial variability. Mar. Struct. 2018, 57, 87–104. [Google Scholar] [CrossRef]
- Rivier, A.; Bennis, A.C.; Pinon, G.; Magar, V.; Gross, M. Parameterization of wind turbine impacts on hydrodynamics and sediment transport. Ocean Dyn. 2016, 66, 1285–1299. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, A.W.; Liu, X.F.; Sumer, B.M.; Fredsoe, J. Flow and bed shear stresses in scour protections around a pile in a current. Coast. Eng. 2013, 72, 20–38. [Google Scholar] [CrossRef]
- Riahi-Madvar, H.; Dehghani, M.; Seifi, A.; Salwana, E.; Shamshirband, S.; Mosavi, A.; Chau, K.W. Comparative analysis of soft computing techniques RBF, MLP, and ANFIS with MLR and MNLR for predicting grade-control scour hole geometry. Eng. Appl. Comput. Fluid Mech. 2019, 13, 529–550. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.; Tufail, M.; Azamathulla, H.M.; Ahmad, I.; Muhammad, N. Genetic functions-based modelling for pier scour depth prediction in coarse bed streams. Proc. Inst. Civ. Eng. Water Manag. 2018, 171, 225–240. [Google Scholar] [CrossRef]
- Ebtehaj, I.; Bonakdari, H.; Moradi, F.; Gharabaghi, B.; Khozani, Z.S. An integrated framework of Extreme Learning Machines for predicting scour at pile groups in clear water condition. Coast. Eng. 2018, 135, 1–15. [Google Scholar] [CrossRef]
- Eghbalzadeh, A.; Hayati, M.; Rezaei, A.; Javan, M. Prediction of equilibrium scour depth in uniform non-cohesive sediments downstream of an apron using computational intelligence. Eur. J. Environ. Civ. Eng. 2018, 22, 28–41. [Google Scholar] [CrossRef]
- Chou, J.S.; Pham, A.D. Nature-inspired metaheuristic optimization in least squares support vector regression for obtaining bridge scour information. Inf. Sci. 2017, 399, 64–80. [Google Scholar] [CrossRef]
- Ebtehaj, I.; Sattar, A.M.A.; Bonakdari, H.; Zaji, A.H. Prediction of scour depth around bridge piers using self-adaptive extreme learning machine. J. Hydroinform. 2017, 19, 207–224. [Google Scholar] [CrossRef]
- Lashkar-Ara, B.; Ghotbi, S.M.H.; Najafi, L. Prediction of scour in plunge pools below outlet bucket using artificial intelligence. KSCE J. Civ. Eng. 2016, 20, 2981–2990. [Google Scholar] [CrossRef]
- Mesbahi, M.; Talebbeydokhti, N.; Hosseini, S.A.; Afzali, S.H. Gene-expression programming to predict the local scour depth at downstream of stilling basins. Sci. Iran. 2016, 23, 102–113. [Google Scholar] [CrossRef] [Green Version]
- Choi, S.U.; Choi, B.; Choi, S. Improving predictions made by ANN model using data quality assessment: An application to local scour around bridge piers. J. Hydroinform. 2015, 17, 977–989. [Google Scholar] [CrossRef]
- Hosseini, R.; Amini, A. Scour depth estimation methods around pile groups. KSCE J. Civ. Eng. 2015, 19, 2144–2156. [Google Scholar] [CrossRef]
- Cheng, M.Y.; Cao, M.T. Hybrid intelligent inference model for enhancing prediction accuracy of scour depth around bridge piers. Struct. Infrastruct. Eng. 2015, 11, 1178–1189. [Google Scholar] [CrossRef]
- Turan, K.H.; Yanmaz, A.M. Reliability-based optimization of river bridges using artificial intelligence techniques. Can. J. Civ. Eng. 2011, 38, 1103–1111. [Google Scholar] [CrossRef]
- Zounemat-Kermani, M.; Teshnehlab, M. Using adaptive neuro-fuzzy inference system for hydrological time series prediction. Appl. Soft Comput. 2008, 8, 928–936. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Zhang, Y.; Stritlien, K.; Bellingham, J.G.; Baggeroer, A.B. Acoustic doppler velocimeter flow measurement from an autonomous underwater vehicle with applications to deep ocean convection. J. Atmos. Ocean. Technol. 2001, 18, 2038–2051. [Google Scholar] [CrossRef]
- Nezu, I.; Rodi, M.A.W. Open-channel flow measurements with a laser doppler anemomter. J. Hydraul. Eng. 1986, 112, 335–355. [Google Scholar] [CrossRef]
- Kocsis, L.; Herman, P.; Eke, A. The modified Beer-Lambert law revisited. Phys. Med. Biol. 2006, 51, 91–98. [Google Scholar] [CrossRef]
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A Survey of Underwater Wireless Optical Communication. IEEE Commun. Surv. Tutor. 2017, 19, 204–238. [Google Scholar] [CrossRef]
- Wang, C.; Yu, H.Y.; Zhu, Y.J. A long distance underwater visible light communication system with single photon avalanche diode. IEEE Photonics J. 2016, 8, 7906311. [Google Scholar] [CrossRef]
- Al-Kinani, A.; Wang, C.X.; Zhou, L.; Zhang, W. Optical wireless communication channel measurements and models. IEEE Commun. Surv. Tutor. 2018, 20, 1939–1962. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Chang, C.C.; Wu, C.T.; Lin, Y.B.; Gu, M.H. Water velocimeter and turbidity-meter using visible light communication modules. In Proceedings of the Sensors, 2013 IEEE, Baltimore, MD, USA, 3–6 November 2013. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, S.H.; Zheng, Q.; Tung, C.C.; Liu, H.H. The empirical mode decomposition method and the Hilbert spectrum for non-stationary time series analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Su, S.C.; Wen, K.L.; Huang, N.E. A New Dynamic Building Health Monitoring Method Based on the Hilbert-Huang Transform. Terr. Atmos. Ocean. Sci. 2014, 25, 289–318. [Google Scholar] [CrossRef]
- Wu, Z.H.; Huang, N.E. Ensemble Empirical Mode Decomposition: A Noise-Assisted Data Analysis Method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]








© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.-B.; Lin, T.-K.; Chang, C.-C.; Huang, C.-W.; Chen, B.-T.; Lai, J.-S.; Chang, K.-C. Visible Light Communication System for Offshore Wind Turbine Foundation Scour Early Warning Monitoring. Water 2019, 11, 1486. https://doi.org/10.3390/w11071486
Lin Y-B, Lin T-K, Chang C-C, Huang C-W, Chen B-T, Lai J-S, Chang K-C. Visible Light Communication System for Offshore Wind Turbine Foundation Scour Early Warning Monitoring. Water. 2019; 11(7):1486. https://doi.org/10.3390/w11071486
Chicago/Turabian StyleLin, Yung-Bin, Tzu-Kang Lin, Cheng-Chun Chang, Chang-Wei Huang, Ben-Ting Chen, Jihn-Sung Lai, and Kuo-Chun Chang. 2019. "Visible Light Communication System for Offshore Wind Turbine Foundation Scour Early Warning Monitoring" Water 11, no. 7: 1486. https://doi.org/10.3390/w11071486