Comparative Analysis of High-Resolution Soil Moisture Simulations from the Soil, Vegetation, and Snow (SVS) Land Surface Model Using SAR Imagery Over Bare Soil

 , , ,
, , ,
Abstract
:1. Introduction
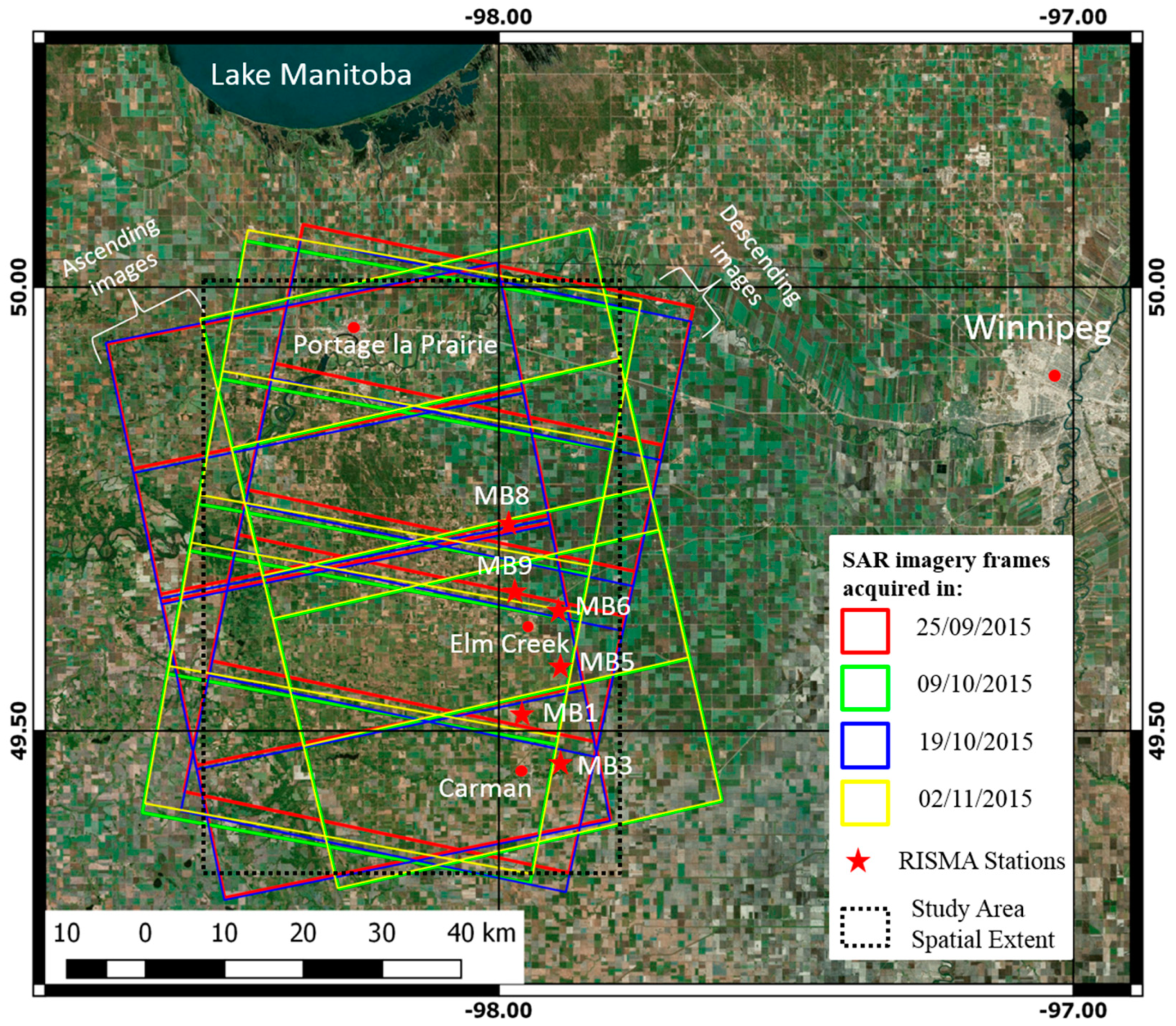
2. Experimental Site and SAR Imagery
3. Methodology
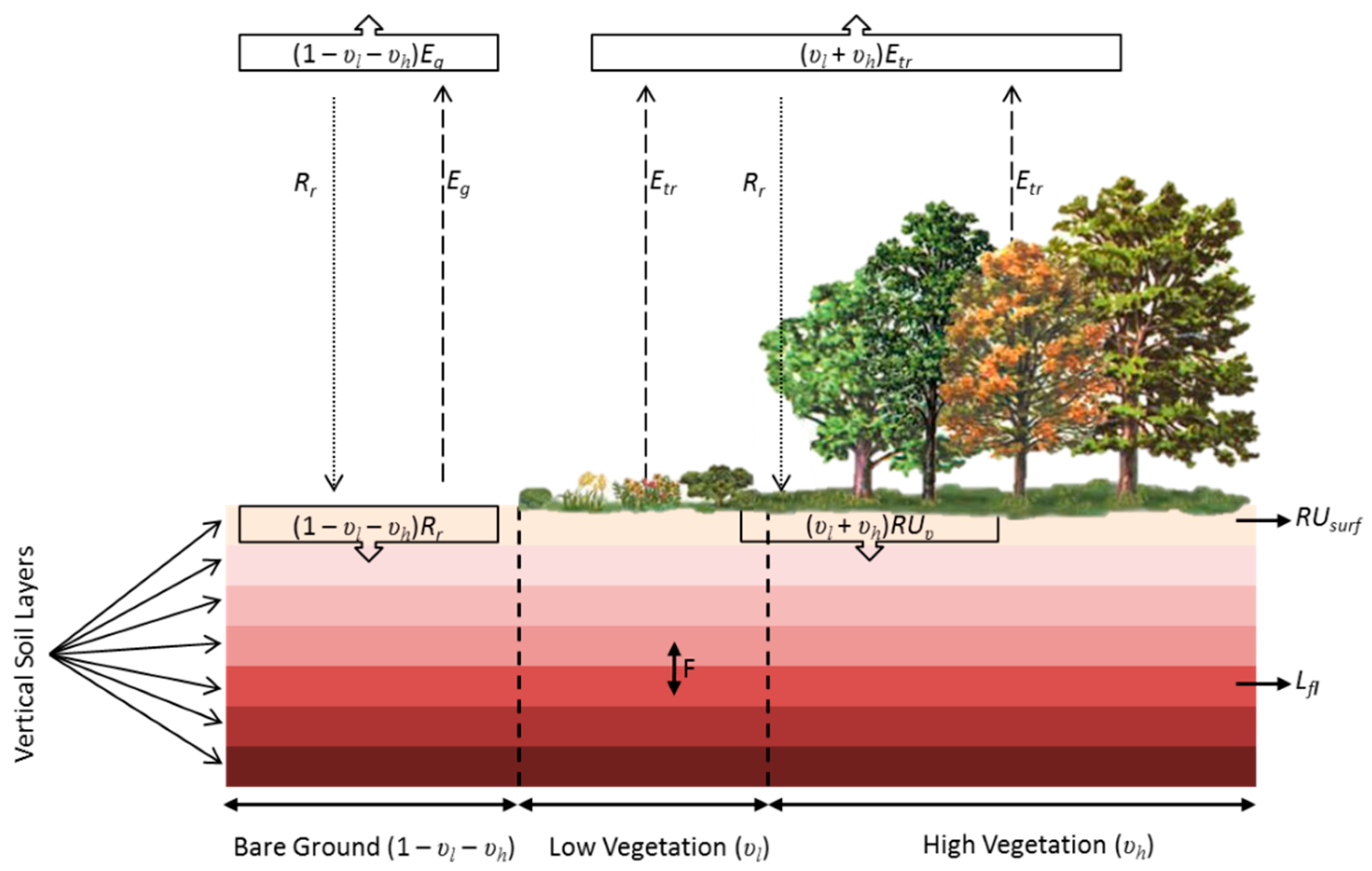
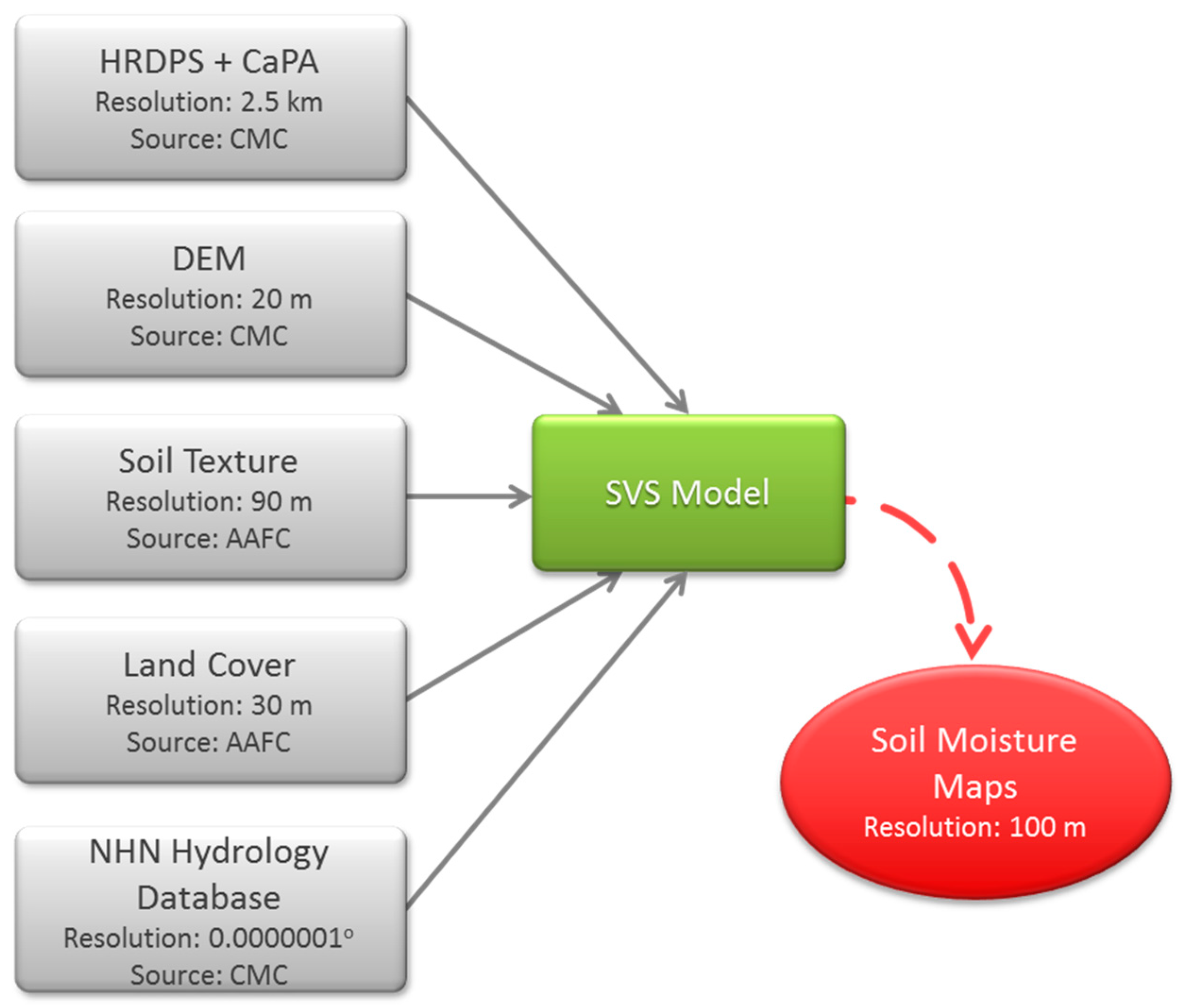
3.1. SVS Experimental Setup
3.2. Soil Moisture Retrieval Using SAR Imagery
4. Results and Discussion
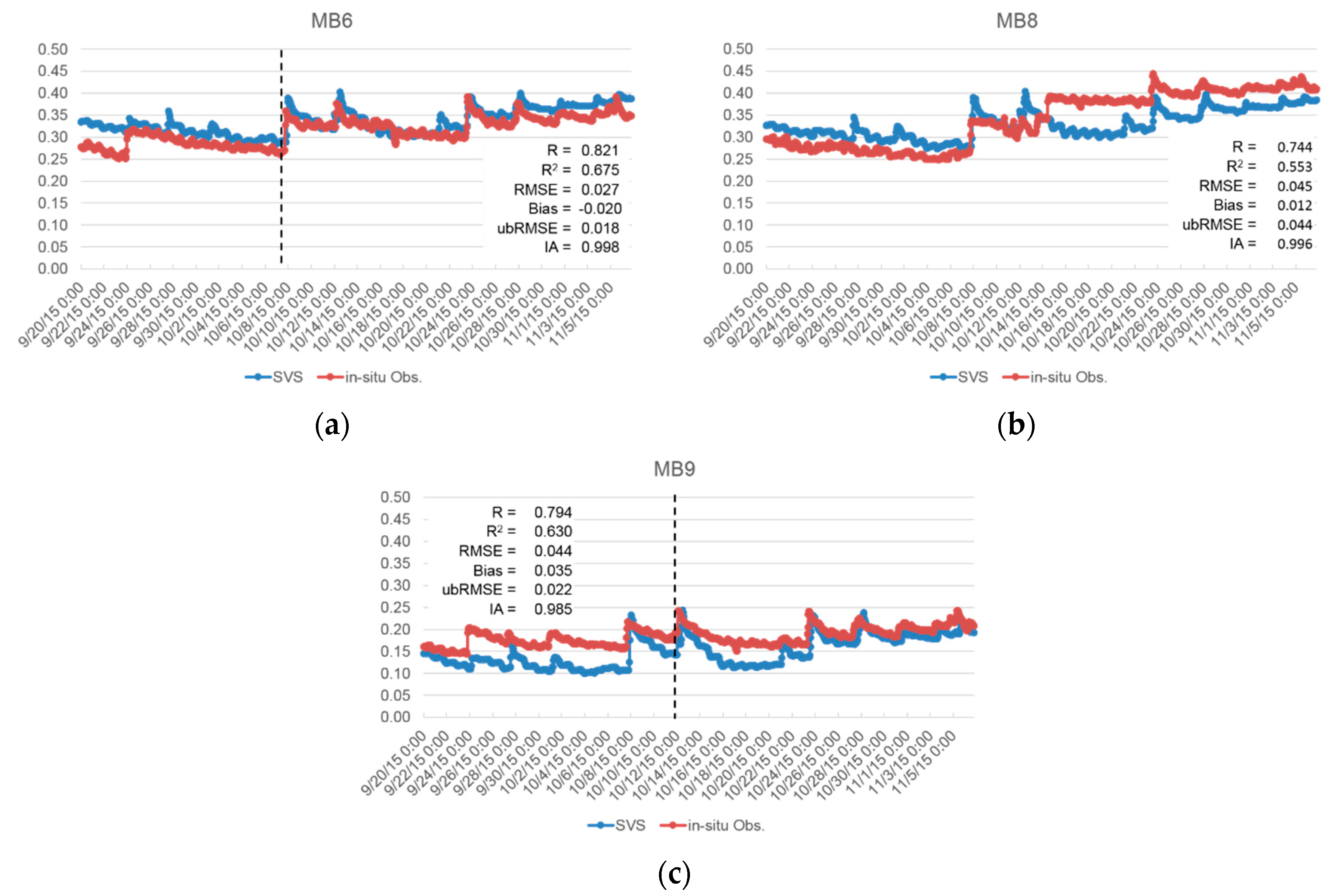
4.1. Verification against In Situ Observations
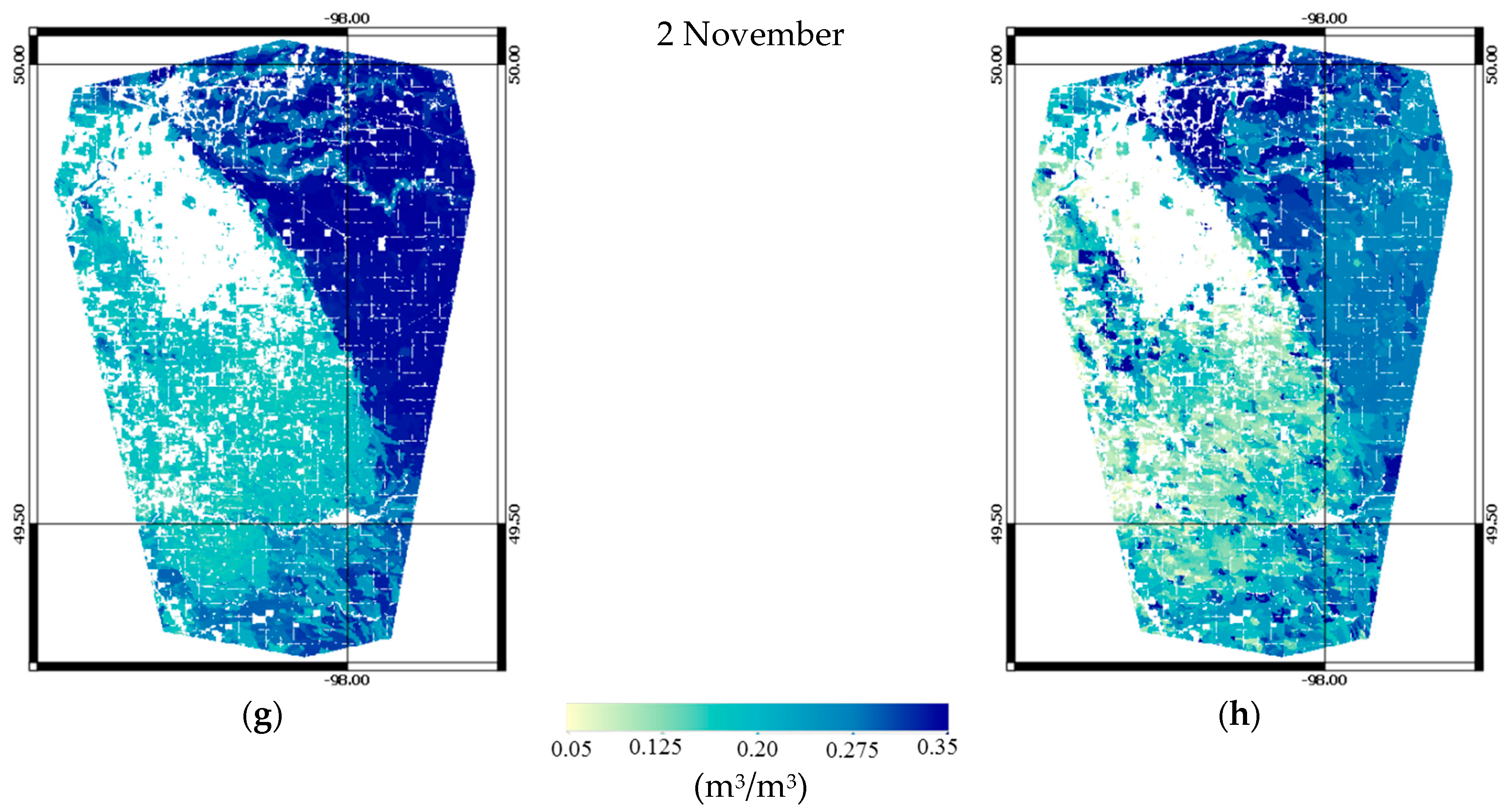
4.2. Qualitative Analysis
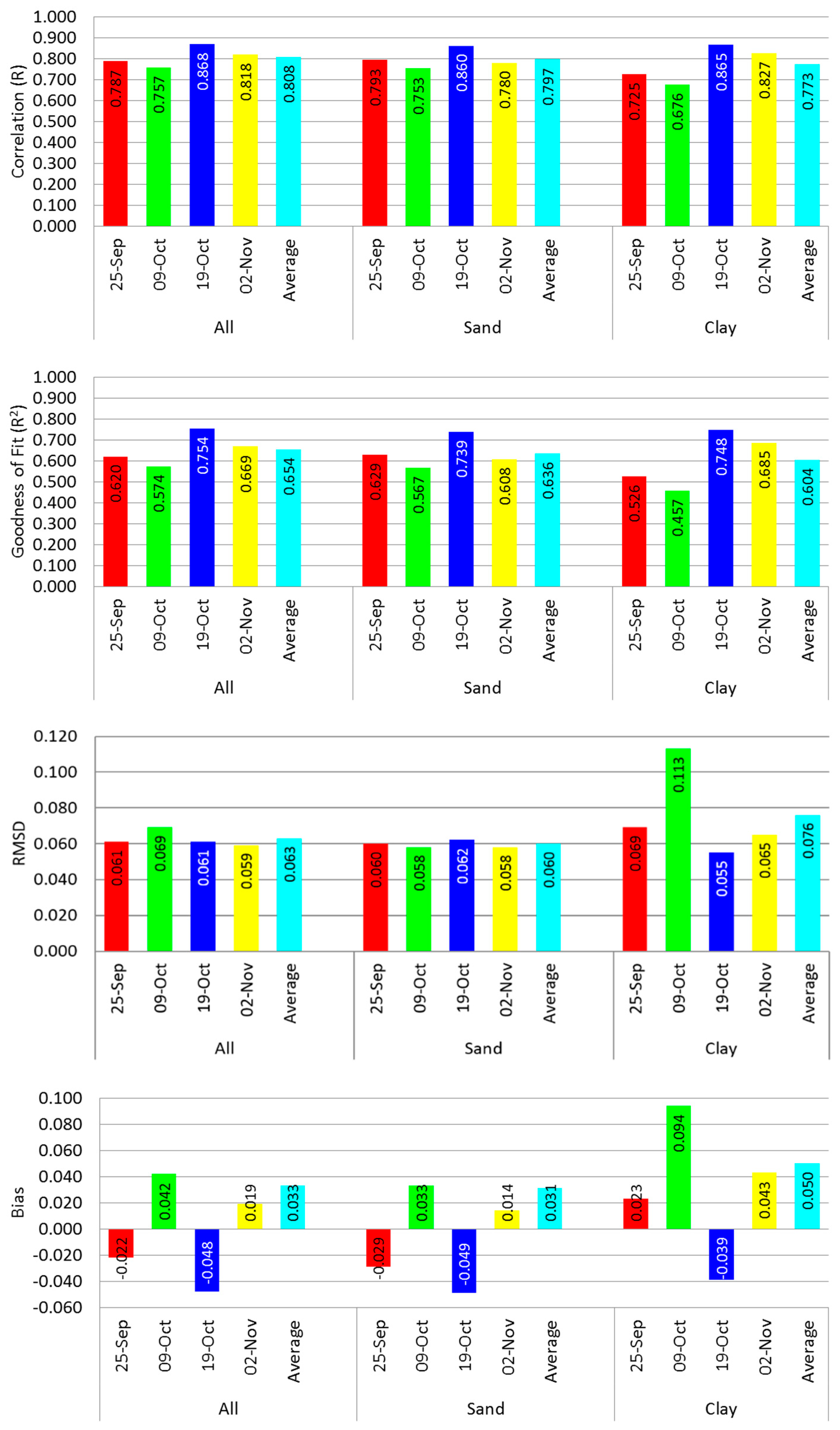
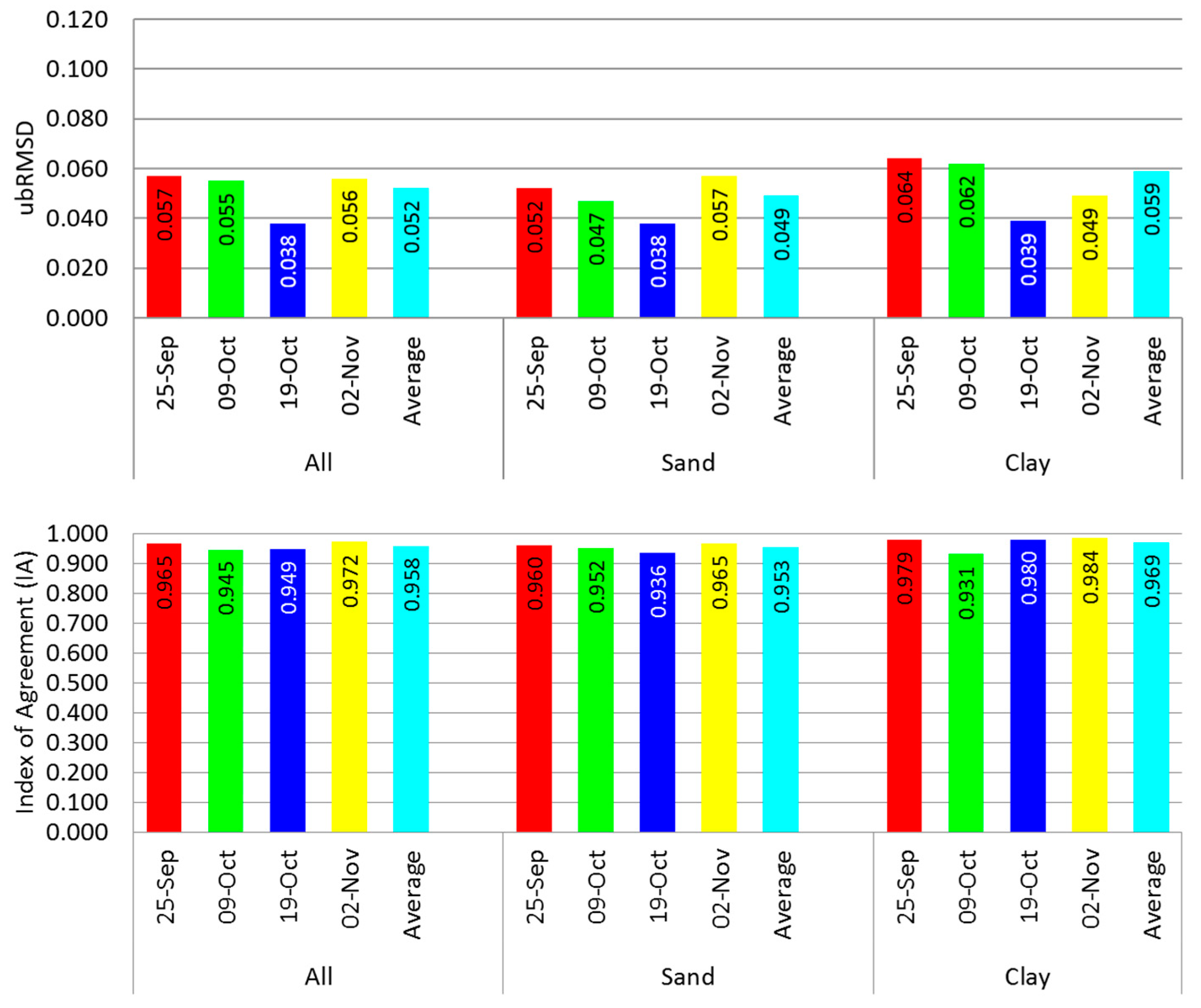
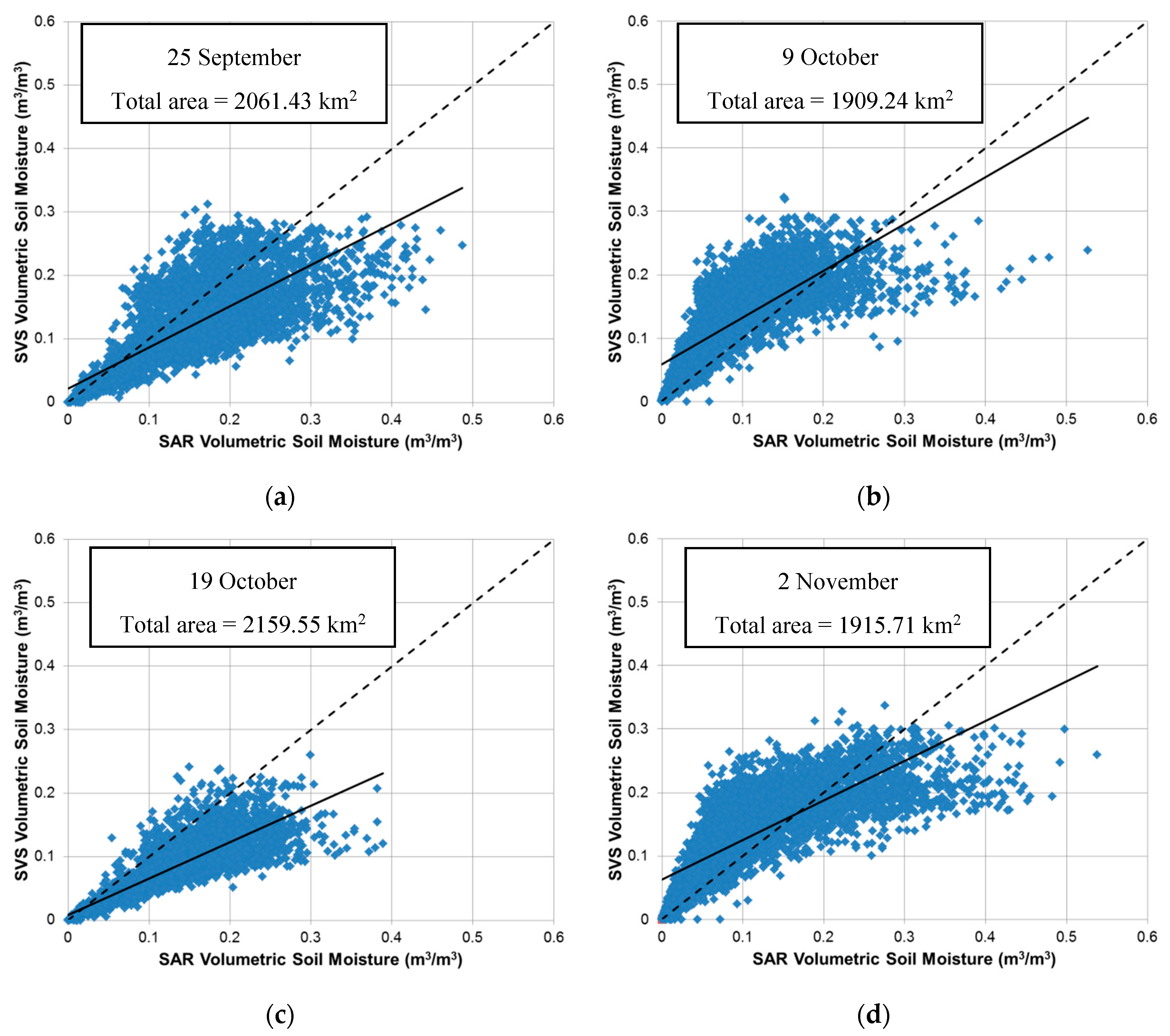
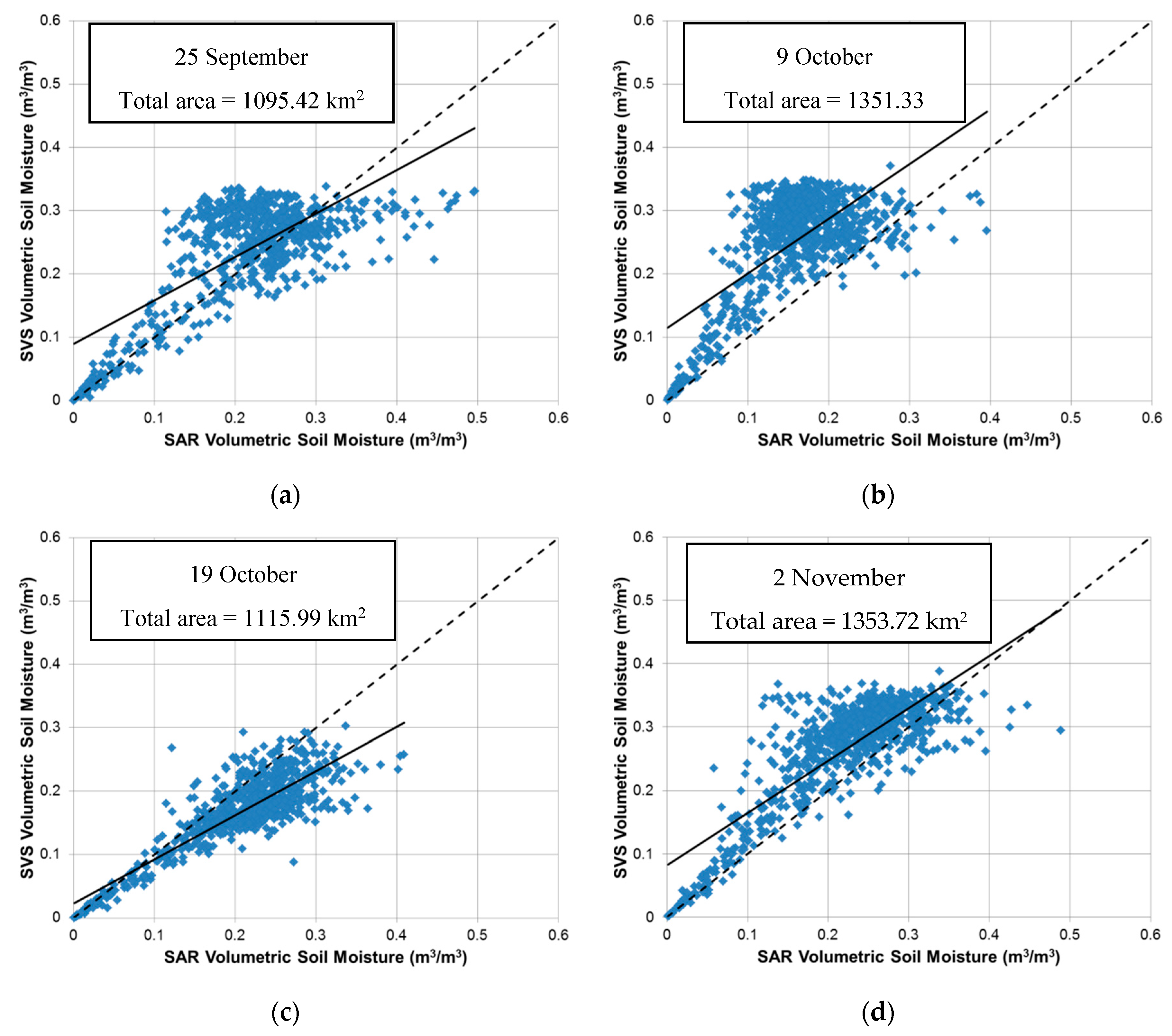
4.3. Quantitative Analysis
4.4. Soil Moisture as a Function of the Soil Texture
4.4.1. Sand
4.4.2. Clay
4.5. Limitations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- National Research Council. Issues in the Integration of Research and Operational Satellite Systems for Climate Research: Part I Science and Design; The National Academies Press: Washington, DC, USA, 2000. [Google Scholar]
- Eltahir, E.A.B. A soil moisture-rainfall feedback mechanism, 1. Theory and observations. Water Resour. Res. 1998, 34, 765–776. [Google Scholar] [CrossRef]
- Findell, K.L.; Eltahir, E.A.B. Atmospheric controls on soil moisture-boundary layer interactions. Part 1: Framework development. J. Hydrometeorol. 2003, 4, 552–569. [Google Scholar] [CrossRef]
- Trier, S.; Chen, F.; Manning, K.W.; LeMone, M.A.; Davis, C.A. Sensitivity of the PBL and precipitation in 12-day simulations of warm-season convection using different land surface models and soil wetness conditions. Mon. Weather Rev. 2008, 136, 2321–2343. [Google Scholar] [CrossRef]
- Seneviratne, S.I.; Corti, T.; Davin, E.L.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A.J. Investigating soil moisture-climate interactions in a changing climate: A review. Earth-Sci. Rev. 2010, 99, 126–161. [Google Scholar] [CrossRef]
- Evans, C.; Schumacher, R.S.; Galarneau, T.J., Jr. Sensitivity in the overland reintensification of tropical cyclone Erin (2007) to near-surface soil moisture characteristics. Mon. Weather Rev. 2011, 139, 3848–3870. [Google Scholar] [CrossRef]
- Pablos, M.; Martínez-Fernández, J.; Piles, M.; Sánchez, N.; Vall-llossera, M.; Camps, A. Multi-temporal evaluation of soil moisture and land surface temperature dynamics using in Situ and Satellite Observations. Remote Sens. 2016, 8, 587. [Google Scholar] [CrossRef]
- Bolten, J.D.; Crow, W.T.; Zhan, X.; Jackson, T.J.; Reynolds, C.A. Evaluating the utility of remotely sensed soil moisture retrievals on operational agricultural drought monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 57–66. [Google Scholar] [CrossRef]
- Champagne, C.; Davidson, A.; Cherneski, P.; L’Heureux, J.; Hadwen, T. Monitoring agricultural risk in Canada using L-band passive microwave soil moisture from SMOS. J. Hydrometeorol. 2015, 16, 5–18. [Google Scholar] [CrossRef]
- Champagne, C.; Rowlandson, T.; Berg, A.; Burns, T.; L’Heureux, J.; Tetlock, E.; Adams, J.; McNairn, H.; Toth, B.; Itensifu, D. Satellite surface soil moisture from SMOS and Aquarius: Assessment for applications in agricultural landscapes. Int. J. Appl. Earth Obs. Geoinf. 2016, 45, 143–154. [Google Scholar] [CrossRef]
- Lievens, H.; Tomer, S.K.; Al Bitar, A.; De Lannoy, G.J.M.; Drusch, M.; Dumedah, G.; Hendricks Franssen, H.-J.; Kerr, Y.H.; Martens, B.; Pan, M.; et al. SMOS soil moisture assimilation for improved hydrologic simulation in the Murray Darling Basin, Australia. Remote Sens. Environ. 2015, 168, 146–162. [Google Scholar] [CrossRef]
- Crow, W.T.; Chen, F.; Reichle, R.H.; Liu, Q. L band microwave remote sensing and land data assimilation improve the representation of prestorm soil moisture conditions for hydrologic forecasting. Geophys. Res. Lett. 2017, 44, 5495–5503. [Google Scholar] [CrossRef] [PubMed]
- Garnaud, C.; Bélair, S.; Carrera, M.; McNairn, H.; Pacheco, A. Field-scale spatial variability of soil moisture and L-Band Brightness Temperature from Land Surface Modeling. J. Hydrometeorol. 2017, 18, 573–589. [Google Scholar] [CrossRef]
- Merzouki, M.; McNairn, H. A hybrid (multi-angle and multipolarization) approach to soil moisture retrieval using the integral equation model: Preparing for the RADARSAT constellation mission. Can. J. Remote Sens. 2015, 41, 349–362. [Google Scholar] [CrossRef]
- Alavi, N.; Bélair, S.; Fortin, V.; Zhang, S.; Husain, S.Z.; Carrera, M.L.; Abrahamowicz, M. Warm season evaluation of soil moisture prediction in the Soil, Vegetation, and Snow (SVS) scheme. J. Hydrometeorol. 2016, 17, 2315–2332. [Google Scholar] [CrossRef]
- Koster, R.D.; Suarez, M.J.; Ducharne, A.; Stieglitz, M.; Kumar, P. A catchment-based approach to modeling land surface processes in a general circulation model: 1. Model structure. J. Geophys. Res. 2000, 105, 24809–24822. [Google Scholar] [CrossRef]
- Carrera, M.; Bélair, S.; Bilodeau, B. The Canadian land data assimilation system (CaLDAS): Description and synthetic evaluation study. J. Hydrometeorol. 2015, 16, 1293–1314. [Google Scholar] [CrossRef]
- Milbrandt, J.A.; Bélair, S.; Faucher, M.; Vallée, M.; Carrera, M.L.; Glazer, A. The Pan-Canadian High-Resolution (2.5 km) Deterministic Prediction System. Weather Forecast. 2016, 31, 1791–1816. [Google Scholar] [CrossRef]
- Noilhan, J.; Planton, S. A simple parameterization of land surface processes for meteorological models. Mon. Weather Rev. 1989, 117, 536–549. [Google Scholar] [CrossRef]
- Noilhan, J.; Mahfouf, J.-F. The ISBA land surface parameterization scheme. Glob. Planet. Chang. 1996, 13, 145–159. [Google Scholar] [CrossRef]
- Bélair, S.; Crevier, L.-P.; Mailhot, J.; Bilodeau, B.; Delage, Y. Operational implementation of the ISBA land surface scheme in the Canadian regional weather forecast model. Part I: Warm season results. J. Hydrometeorol. 2003, 4, 352–370. [Google Scholar] [CrossRef]
- Bélair, S.; Brown, R.; Mailhot, J.; Bilodeau, B.; Crevier, L.-P. Operational implementation of the ISBA land surface scheme in the Canadian regional weather forecast model. Part II: Cold season results. J. Hydrometeorol. 2003, 4, 371–386. [Google Scholar] [CrossRef]
- Husain, S.Z.; Alavi, N.; Bélair, S.; Carrera, M.; Zhang, S.; Fortin, V.; Abrahamowicz, M.; Gauthier, N. The multibudget soil, vegetation, and snow (SVS) scheme for land surface parameterization: Offline warm season evaluation. J. Hydrometeorol. 2016, 17, 2293–2313. [Google Scholar] [CrossRef]
- Soulis, E.D.; Snelgrove, K.R.; Kouwen, N.; Seglenieks, F.; Verseghy, D.L. Towards closing the vertical water balance in Canadian atmospheric models: Coupling of the land surface scheme class with the distributed hydrological model watflood. Atmos. Ocean 2000, 38, 251–269. [Google Scholar] [CrossRef]
- Garnaud, C.; Bélair, S.; Berg, A.; Rowlandson, T. Hyperresolution Land Surface Modeling in the Context of SMAP Cal–Val. J. Hydrometeorol. 2016, 17, 345–352. [Google Scholar] [CrossRef]
- Maheu, A.; Anctil, F.; Gaborit, É.; Fortin, V.; Nadeau, D.; Therrien, R. A field evaluation of soil moisture modelling with the Soil, Vegetation, and Snow (SVS) land surface model using evapotranspiration observations as forcing data. J. Hydrol. 2018, 558, 532–545. [Google Scholar] [CrossRef]
- Rüdiger, C.; Calvet, J.; Gruhier, C.; Holmes, T.R.; de Jeu, R.A.; Wagner, W. An intercomparison of ERS-Scat and AMSR-E soil moisture observations with model simulations over France. J. Hydrometeorol. 2009, 10, 431–447. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.P.; Ducharne, A.; Kerr, Y.; de Rosnay, P.; de Jeu, R.; Govind, A.; Al Bitar, A.; Albergel, C.; Muñoz-Sabater, J.; et al. Global-scale evaluation of two satellite-based passive microwave soil moisture datasets (SMOS and AMSR-E) with respect to Land Data Assimilation System estimates. Remote Sens. Environ. 2014, 149, 181–195. [Google Scholar] [CrossRef]
- McNairn, H.; Jackson, T.J.; Wiseman, G.; Belair, S.; Berg, A.; Bullock, A.; Colliander, A.; Cosh, M.H.; Kim, S.-B.; Magagi, R.; et al. The soil moisture active passive validation experiment 2012 (SMAPVEX12): Prelaunch Calibration and Validation of the SMAP Soil Moisture Algorithms. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2784–2801. [Google Scholar] [CrossRef]
- Michalyna, W.; Podolsky, G.; Jacques, S. Soils of the Rural Municipalities of Grey, Dufferin, Roland, Thompson and Part of Stanley; Report D60; Agriculture and Agri-Food Canada, Manitoba Agriculture and the University of Manitoba: Winnipeg, MB, Canada, 1988. [Google Scholar]
- Bhumralkar, C.M. Numerical experiments on the computation of ground surface temperature in an atmospheric general circulation model. J. Appl. Meteorol. 1975, 14, 1246–1258. [Google Scholar] [CrossRef]
- Mahfouf, J.-F.; Brasnett, B.; Gagnon, S. A Canadian Precipitation Analysis (CaPA) project: Description and preliminary results. Atmos. Ocean 2007, 45, 1–17. [Google Scholar] [CrossRef]
- Fung, A.K.; Li, Z.; Chen, K.S. Backscattering from a randomly rough dielectric surface. IEEE Trans. Geosci. Remote Sens. 1992, 30, 356–369. [Google Scholar] [CrossRef]
- Hallikainen, M.T.; Ulaby, F.T.; Dobson, M.C.; El-rayes, M.A.; Wu, L. Microwave dielectric behavior of wet soil-part 1: Empirical models and experimental observations. IEEE Trans. Geosci. Remote Sens. 1985, 23, 25–34. [Google Scholar] [CrossRef]
- Entekhabi, D.; Reichle, R.H.; Koster, R.D.; Crow, W.T. Performance metrics for soil moisture retrievals and application requirements. J. Hydrometeorol. 2010, 11, 832–840. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, T.; Zhou, P.; Shao, Y.; Gao, S. Validation analysis of SMAP and AMSR2 soil moisture products over the United States using ground-based measurements. Remote Sens. 2017, 9, 104. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive—Volume 2: Radar Remote Sensing and Surface Scattering and Emission Theory; Artech House: Norwood, MA, USA, 1982. [Google Scholar]
- Koyama, C.N.; Liu, H.; Takahashi, K.; Shimada, M.; Watanabe, M.; Khuut, T.; Sato, M. In-Situ Measurement of Soil Permittivity at Various Depths for the Calibration and Validation of Low-Frequency SAR Soil Moisture Models by Using GPR. Remote Sens. 2017, 9, 580. [Google Scholar] [CrossRef]
- Phogat, V.K.; Tomar, V.S.; Dahiya, R. Soil physical properties. In Soil Science: An Introduction; Rattan, R.K., Katyal, J.C., Dwivedi, B.S., Sarkar, A.K., Bhattachatyya, T., Tarafdar, J.C., Eds.; Indian Society of Soil Science: New Delhi, India, 2015; pp. 135–171. [Google Scholar]
- Wood, D.; Kumar, G.V. Experimental observation of behaviour of heterogeneous soils. Mech. Cohesive-Frict. Mater. 2000, 5, 373–398. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RADARSAT-2 Beam Mode | Acquisition Date and Time (CDT) | Orbit Direction | Incidence Angle | Pixel Spacing (Range × Azimuth) |
|---|---|---|---|---|
| FQ8W | 25/09/2015 07:53:28–07:53:35 | Descending | 27.74° | 4.7 m × 4.8 m |
| FQ10W | 25/09/2015 19:16:07–19:16:14 | Ascending | 29.95° | 4.7 m × 5.5 m |
| FQ17W | 09/10/2015 07:45:09–07:45:17 | Descending | 37.16° | 4.7 m × 5.6 m |
| FQ2W | 09/10/2015 19:07:48–19:07:53 | Ascending | 20.74° | 4.7 m × 5.3 m |
| FQ8W | 19/10/2015 07:53:27–07:53:32 | Descending | 27.73° | 4.7 m × 4.8 m |
| FQ10W | 19/10/2015 19:16:05–19:16:11 | Ascending | 29.94° | 4.7 m × 5.5 m |
| FQ17W | 02/11/2015 07:45:08–07:45:14 | Descending | 37.15° | 4.7 m × 5.6 m |
| FQ2W | 02/11/2015 19:07:46–19:07:52 | Ascending | 20.75° | 4.7 m × 5.3 m |
| MB1 | MB3 | MB5 | MB6 | MB8 | MB9 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Obs. | SAR | Obs. | SAR | Obs. | SAR | Obs. | SAR | Obs. | SAR | Obs. | SAR | Mean Diff. | |
| 25 Sept. | 0.206 | 0.228 | 0.318 | 0.392 | 0.349 | 0.267 | 0.312 | 0.192 | 0.275 | 0.242 | 0.187 | 0.193 | 0.056 |
| 9 Oct. | 0.166 | 0.104 | 0.306 | 0.306 | 0.295 | 0.277 | 0.324 | 0.203 | 0.332 | 0.211 | 0.193 | 0.111 | 0.067 |
| 19 Oct. | 0.172 | 0.221 | 0.279 | 0.248 | 0.295 | 0.267 | 0.308 | 0.383 | 0.382 | 0.362 | 0.166 | 0.047 | 0.054 |
| 2 Nov. | 0.206 | 0.180 | 0.322 | 0.326 | 0.338 | 0.347 | 0.343 | 0.320 | 0.411 | 0.398 | 0.197 | 0.193 | 0.013 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dabboor, M.; Sun, L.; Carrera, M.L.; Friesen, M.; Merzouki, A.; McNairn, H.; Powers, J.; Bélair, S. Comparative Analysis of High-Resolution Soil Moisture Simulations from the Soil, Vegetation, and Snow (SVS) Land Surface Model Using SAR Imagery Over Bare Soil. Water 2019, 11, 542. https://doi.org/10.3390/w11030542
Dabboor M, Sun L, Carrera ML, Friesen M, Merzouki A, McNairn H, Powers J, Bélair S. Comparative Analysis of High-Resolution Soil Moisture Simulations from the Soil, Vegetation, and Snow (SVS) Land Surface Model Using SAR Imagery Over Bare Soil. Water. 2019; 11(3):542. https://doi.org/10.3390/w11030542
Chicago/Turabian StyleDabboor, Mohammed, Leqiang Sun, Marco L. Carrera, Matthew Friesen, Amine Merzouki, Heather McNairn, Jarrett Powers, and Stéphane Bélair. 2019. "Comparative Analysis of High-Resolution Soil Moisture Simulations from the Soil, Vegetation, and Snow (SVS) Land Surface Model Using SAR Imagery Over Bare Soil" Water 11, no. 3: 542. https://doi.org/10.3390/w11030542