

PolyVerif
An Open-Source environment for validation and verification of autonomy.
PolyVerif High-Level Architecture
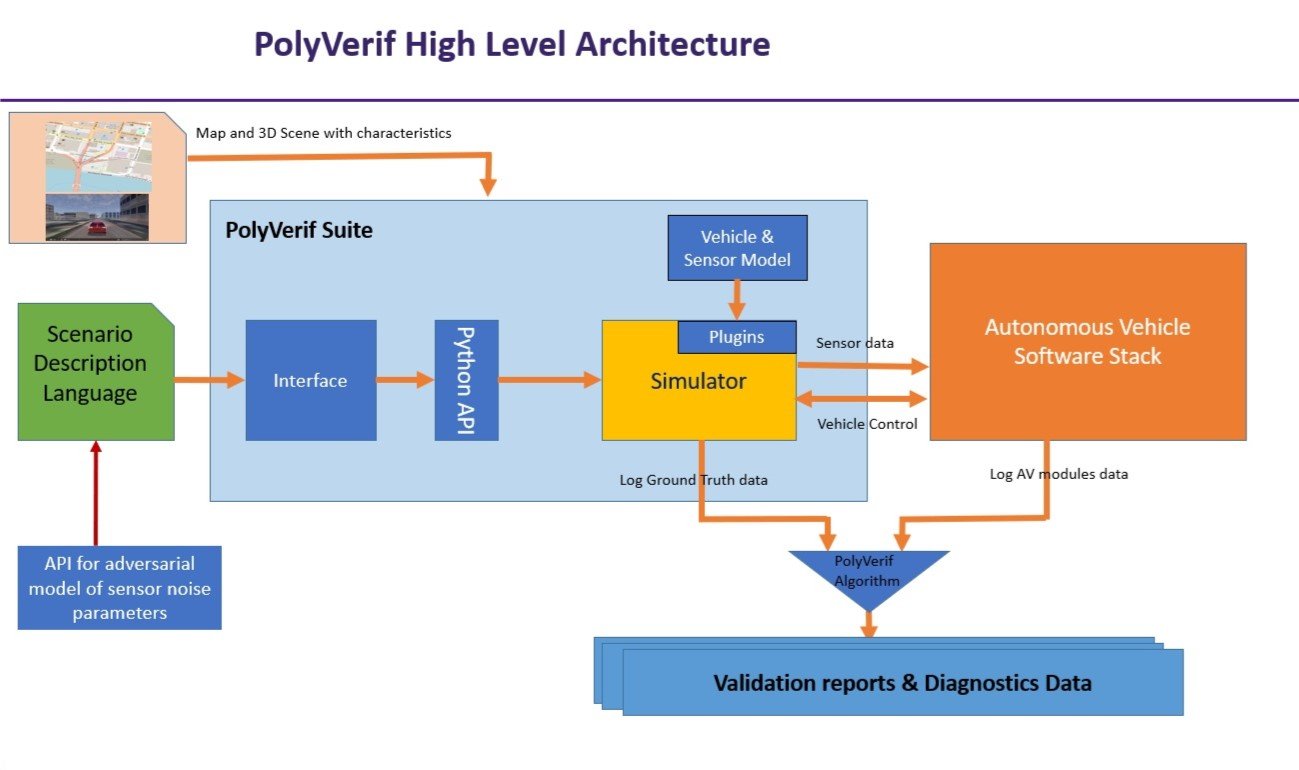
PolyVerif is an open-source validation and verification framework for autonomous vehicles. The framework integrates open-source components such as Autoware, Scenic, and LG Simulator within an overall Design for Experiment structure. PolyVerif also provides multiple pathways (drone, ground, etc) to build digital twin capability into the simulation environment. Polyverif provides extensive API access to introduce noise models for sensors, GPS, perception, and path planning functions. Sponsored by Florida Polytechnic University, the PolyVerif framework’s objective is to provide a highly functional research platform. Finally, the platform provides access to maintenance and consulting services through a third-party for industrial clients.
PolyVerif Validation Goals

Detection Validation: Do the sensors actually “see“ the objects of interest?
Perception Validation: Having “seen“ the objects, are they recognized sufficiently to determine future movement?

Location Validation: Decisions on movement are based on the current position, is the current position “known“.. both globally and relative to local objects.

Decision Validation: Even when perception is perfect and control systems provide stability, are the correct choices on path planning being made?
Control Validation: Many tasks in autonomy are control systems (E.g. Cruise control). Are these systems stable under environmental noise?